 > *N.B.:* As always, I am more than happy to welcome contributors (see [How to contribute](#how-to-contribute)).
**Pose2Sim releases:**
- [x] **v0.1** *(08/2021)*: Published paper
- [x] **v0.2** *(01/2022)*: Published code
- [x] **v0.3** *(01/2023)*: Supported other pose estimation algorithms
- [x] **v0.4** *(07/2023)*: New calibration tool based on scene measurements
- [x] **v0.5** *(12/2023)*: Automatic batch processing
- [x] **v0.6** *(02/2024)*: Marker augmentation, Blender visualizer
- [x] **v0.7** *(03/2024)*: Multi-person analysis
- [x] **v0.8** *(04/2024)*: New synchronization tool
- [x] **v0.9: *(07/2024)*: Integration of pose estimation in the pipeline**
- [ ] v0.10: Integration of OpenSim in the pipeline
- [ ] v0.11: Calibration based on keypoint detection, Handling left/right swaps, Correcting lens distortions
- [ ] v0.12: Graphical User Interface
- [ ] v1.0: First accomplished release
# Contents
1. [Installation and Demonstration](#installation-and-demonstration)
1. [Installation](#installation)
2. [Demonstration Part-1: Build 3D TRC file](#demonstration-part-1-build-3d-trc-file)
3. [Demonstration Part-2: Obtain 3D joint angles with OpenSim](#demonstration-part-2-obtain-3d-joint-angles-with-opensim)
4. [Demonstration Part-3 (optional): Visualize your results with Blender](#demonstration-part-3-optional-visualize-your-results-with-blender)
5. [Demonstration Part-4 (optional): Try multi-person analysis](#demonstration-part-4-optional-try-multi-person-analysis)
2. [Use on your own data](#use-on-your-own-data)
1. [Setting your project up](#setting-your-project-up)
1. [Retrieve the folder structure](#retrieve-the-folder-structure)
2. [Single Trial vs. Batch processing](#single-trial-vs-batch-processing)
2. [2D pose estimation](#2d-pose-estimation)
1. [With RTMPose (default)](#with-rtmpose-default)
2. [With MMPose (coming soon)](#with-mmpose-coming-soon)
3. [With DeepLabCut](#with-deeplabcut)
4. [With OpenPose (legacy)](#with-openpose-legacy)
5. [With Mediapipe BlazePose (legacy)](#with-mediapipe-blazepose-legacy)
6. [With AlphaPose (legacy)](#with-alphapose-legacy)
4. [Camera calibration](#camera-calibration)
1. [Convert from Qualisys, Optitrack, Vicon, OpenCap, EasyMocap, or bioCV](#convert-from-qualisys-optitrack-vicon-opencap-easymocap-or-biocv)
2. [Calculate from scratch](#calculate-from-scratch)
5. [Synchronizing, Tracking, Triangulating, Filtering](#synchronizing-tracking-triangulating-filtering)
1. [Synchronization](#synchronization)
2. [Associate persons across cameras](#associate-persons-across-cameras)
3. [Triangulating keypoints](#triangulating-keypoints)
4. [Filtering 3D coordinates](#filtering-3d-coordinates)
5. [Marker augmentation](#marker-augmentation)
6. [OpenSim kinematics](#opensim-kinematics)
1. [OpenSim Scaling](#opensim-scaling)
2. [OpenSim Inverse kinematics](#opensim-inverse-kinematics)
3. [Command Line](#command-line)
3. [Utilities](#utilities)
4. [How to cite and how to contribute](#how-to-cite-and-how-to-contribute)
1. [How to cite](#how-to-cite)
2. [How to contribute and to-do list](#how-to-contribute-and-to-do-list)
# Installation and Demonstration
## Installation
1. ***Optional:***\
*Install Anaconda or [Miniconda](https://docs.conda.io/en/latest/miniconda.html) for simplicity and avoiding the risk of incompatibilities between libraries.*
Once installed, open an Anaconda prompt and create a virtual environment:
```
conda create -n Pose2Sim python=3.9 -y
conda activate Pose2Sim
```
2. **Install OpenSim**:\
Install the OpenSim Python API (if you do not want to install via conda, refer [to this page](https://opensimconfluence.atlassian.net/wiki/spaces/OpenSim/pages/53085346/Scripting+in+Python#ScriptinginPython-SettingupyourPythonscriptingenvironment(ifnotusingconda))):
```
conda install -c opensim-org opensim -y
```
3. **INSTALL POSE2SIM**:\
If you don't use Anaconda, type `python -V` in terminal to make sure python>=3.9 is installed.
- OPTION 1: **Quick install:** Open a terminal.
``` cmd
pip install pose2sim
```
- OPTION 2: **Build from source and test the last changes:**
Open a terminal in the directory of your choice and Clone the Pose2Sim repository.
``` cmd
git clone --depth 1 https://github.com/perfanalytics/pose2sim.git
cd pose2sim
pip install .
```
4. ***Optional:***\
*For faster inference, you can run on the GPU. Install pyTorch with CUDA and cuDNN support, and ONNX Runtime with GPU support (not available on MacOS).*
Go to the [pyTorch website]( https://pytorch.org/get-started/locally), select the latest CUDA version that is also [available with ONNX runtime](https://onnxruntime.ai/docs/execution-providers/CUDA-ExecutionProvider.html#requirements), and run the provided command.\
For example, for Windows 11 (June 6th, 2024), CUDA 12.4 is not available for pyTorch, and CUDA 12.1 is not available for ONNX Runtime, so you should revert to CUDA 11.8:
```
pip3 install torch torchvision torchaudio --index-url https://download.pytorch.org/whl/cu118
```
Then install ONNX Runtime with GPU support:
```
pip install onnxruntime-gpu
```
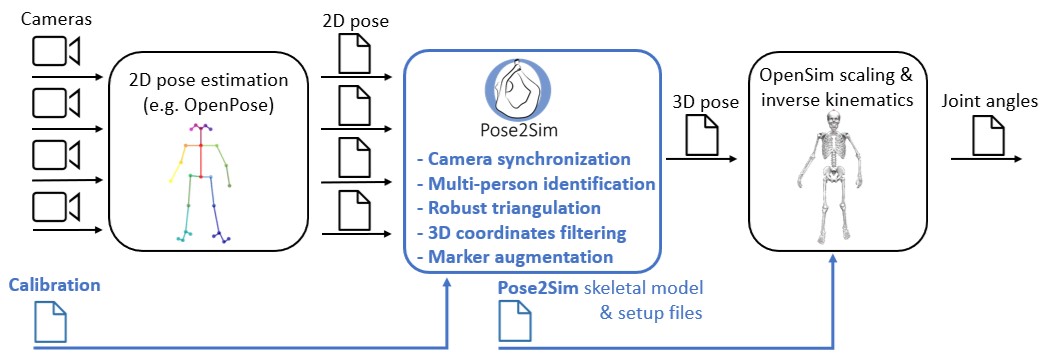
## Demonstration Part-1: Build 3D TRC file
> _**This demonstration provides an example experiment of a person balancing on a beam, filmed with 4 cameras.**_
Open a terminal, enter `pip show pose2sim`, report package location. \
Copy this path and go to the Single participant Demo folder: `cd
> *N.B.:* As always, I am more than happy to welcome contributors (see [How to contribute](#how-to-contribute)).
**Pose2Sim releases:**
- [x] **v0.1** *(08/2021)*: Published paper
- [x] **v0.2** *(01/2022)*: Published code
- [x] **v0.3** *(01/2023)*: Supported other pose estimation algorithms
- [x] **v0.4** *(07/2023)*: New calibration tool based on scene measurements
- [x] **v0.5** *(12/2023)*: Automatic batch processing
- [x] **v0.6** *(02/2024)*: Marker augmentation, Blender visualizer
- [x] **v0.7** *(03/2024)*: Multi-person analysis
- [x] **v0.8** *(04/2024)*: New synchronization tool
- [x] **v0.9: *(07/2024)*: Integration of pose estimation in the pipeline**
- [ ] v0.10: Integration of OpenSim in the pipeline
- [ ] v0.11: Calibration based on keypoint detection, Handling left/right swaps, Correcting lens distortions
- [ ] v0.12: Graphical User Interface
- [ ] v1.0: First accomplished release
# Contents
1. [Installation and Demonstration](#installation-and-demonstration)
1. [Installation](#installation)
2. [Demonstration Part-1: Build 3D TRC file](#demonstration-part-1-build-3d-trc-file)
3. [Demonstration Part-2: Obtain 3D joint angles with OpenSim](#demonstration-part-2-obtain-3d-joint-angles-with-opensim)
4. [Demonstration Part-3 (optional): Visualize your results with Blender](#demonstration-part-3-optional-visualize-your-results-with-blender)
5. [Demonstration Part-4 (optional): Try multi-person analysis](#demonstration-part-4-optional-try-multi-person-analysis)
2. [Use on your own data](#use-on-your-own-data)
1. [Setting your project up](#setting-your-project-up)
1. [Retrieve the folder structure](#retrieve-the-folder-structure)
2. [Single Trial vs. Batch processing](#single-trial-vs-batch-processing)
2. [2D pose estimation](#2d-pose-estimation)
1. [With RTMPose (default)](#with-rtmpose-default)
2. [With MMPose (coming soon)](#with-mmpose-coming-soon)
3. [With DeepLabCut](#with-deeplabcut)
4. [With OpenPose (legacy)](#with-openpose-legacy)
5. [With Mediapipe BlazePose (legacy)](#with-mediapipe-blazepose-legacy)
6. [With AlphaPose (legacy)](#with-alphapose-legacy)
4. [Camera calibration](#camera-calibration)
1. [Convert from Qualisys, Optitrack, Vicon, OpenCap, EasyMocap, or bioCV](#convert-from-qualisys-optitrack-vicon-opencap-easymocap-or-biocv)
2. [Calculate from scratch](#calculate-from-scratch)
5. [Synchronizing, Tracking, Triangulating, Filtering](#synchronizing-tracking-triangulating-filtering)
1. [Synchronization](#synchronization)
2. [Associate persons across cameras](#associate-persons-across-cameras)
3. [Triangulating keypoints](#triangulating-keypoints)
4. [Filtering 3D coordinates](#filtering-3d-coordinates)
5. [Marker augmentation](#marker-augmentation)
6. [OpenSim kinematics](#opensim-kinematics)
1. [OpenSim Scaling](#opensim-scaling)
2. [OpenSim Inverse kinematics](#opensim-inverse-kinematics)
3. [Command Line](#command-line)
3. [Utilities](#utilities)
4. [How to cite and how to contribute](#how-to-cite-and-how-to-contribute)
1. [How to cite](#how-to-cite)
2. [How to contribute and to-do list](#how-to-contribute-and-to-do-list)
# Installation and Demonstration
## Installation
1. ***Optional:***\
*Install Anaconda or [Miniconda](https://docs.conda.io/en/latest/miniconda.html) for simplicity and avoiding the risk of incompatibilities between libraries.*
Once installed, open an Anaconda prompt and create a virtual environment:
```
conda create -n Pose2Sim python=3.9 -y
conda activate Pose2Sim
```
2. **Install OpenSim**:\
Install the OpenSim Python API (if you do not want to install via conda, refer [to this page](https://opensimconfluence.atlassian.net/wiki/spaces/OpenSim/pages/53085346/Scripting+in+Python#ScriptinginPython-SettingupyourPythonscriptingenvironment(ifnotusingconda))):
```
conda install -c opensim-org opensim -y
```
3. **INSTALL POSE2SIM**:\
If you don't use Anaconda, type `python -V` in terminal to make sure python>=3.9 is installed.
- OPTION 1: **Quick install:** Open a terminal.
``` cmd
pip install pose2sim
```
- OPTION 2: **Build from source and test the last changes:**
Open a terminal in the directory of your choice and Clone the Pose2Sim repository.
``` cmd
git clone --depth 1 https://github.com/perfanalytics/pose2sim.git
cd pose2sim
pip install .
```
4. ***Optional:***\
*For faster inference, you can run on the GPU. Install pyTorch with CUDA and cuDNN support, and ONNX Runtime with GPU support (not available on MacOS).*
Go to the [pyTorch website]( https://pytorch.org/get-started/locally), select the latest CUDA version that is also [available with ONNX runtime](https://onnxruntime.ai/docs/execution-providers/CUDA-ExecutionProvider.html#requirements), and run the provided command.\
For example, for Windows 11 (June 6th, 2024), CUDA 12.4 is not available for pyTorch, and CUDA 12.1 is not available for ONNX Runtime, so you should revert to CUDA 11.8:
```
pip3 install torch torchvision torchaudio --index-url https://download.pytorch.org/whl/cu118
```
Then install ONNX Runtime with GPU support:
```
pip install onnxruntime-gpu
```
## Demonstration Part-1: Build 3D TRC file
> _**This demonstration provides an example experiment of a person balancing on a beam, filmed with 4 cameras.**_
Open a terminal, enter `pip show pose2sim`, report package location. \
Copy this path and go to the Single participant Demo folder: `cd ## Demonstration Part-2: Obtain 3D joint angles with OpenSim > _**In the same vein as you would do with marker-based kinematics, start with scaling your model, and then perform inverse kinematics.**_ > N.B.: For now, you still need to install [OpenSim GUI](https://simtk.org/frs/index.php?group_id=91) (tested up to v4.5 on Windows, has to be compiled [from source on Linux](https://simtk-confluence.stanford.edu:8443/display/OpenSim/Linux+Support)). Will be done natively within Pose2Sim soon. ### Scaling 1. Open OpenSim. 2. Open the provided `Model_Pose2Sim_LSTM.osim` model from `Pose2Sim/OpenSim_Setup`. *(File -> Open Model)* 3. Load the provided `Scaling_Setup_Pose2Sim_LSTM.xml` scaling file from `Pose2Sim/OpenSim_Setup`. *(Tools -> Scale model -> Load)* 4. Run. You should see your skeletal model take the static pose. 5. Save your scaled model in `S01_Demo_SingleTrial/OpenSim/Model_Pose2Sim_S00_P00_LSTM_scaled.osim`. *(File -> Save Model As)* ### Inverse kinematics 1. Load the provided `IK_Setup_Pose2Sim_LSTM.xml` scaling file from `Pose2Sim/OpenSim_Setup`. *(Tools -> Inverse kinematics -> Load)* 2. Run. You should see your skeletal model move in the Visualizer window. 5. Your IK motion file will be saved in `S00_P00_OpenSim`.
## Demonstration Part-4 (optional): Try multi-person analysis > _**Another person, hidden all along, will appear when multi-person analysis is activated!**_ Go to the Multi-participant Demo folder: `cd
SingleTrial \ ├── calibration \ ├── pose \ └── Config.toml#### Batch processing For batch processing, each session directory should follow a `Session -> Participant -> Trial` structure, with a `Config.toml` file in each of the directory levels.
Session_s1 \ Config.toml
├── Calibration\
└── Participant_p1 \ Config.toml
└── Trial_t1 \ Config.toml
└── pose \
Run Pose2Sim from the `Session` folder if you want to batch process the whole session, from the `Participant` folder if you want to batch process all the trials of a participant, or from the `Trial` folder if you want to process a single trial. There should be one `Calibration` folder per session.
Global parameters are given in the `Config.toml` file of the `Session` folder, and can be altered for specific `Participants` or `Trials` by uncommenting keys and their values in their respective Config.toml files.\
Try uncommenting `[project]` and set `frame_range = [10,300]` for a Participant for example, or uncomment `[filtering.butterworth]` and set `cut_off_frequency = 10` for a Trial.
## 2D pose estimation
> _**Estimate 2D pose from images with RTMPose or another pose estimation solution.**_
> N.B.: Note that the names of your camera folders must follow the same order as in the calibration file, and end with '_json'.
### With RTMPose *(default)*:
> [RTMPose](https://github.com/open-mmlab/mmpose/tree/main/projects/rtmpose) is a state-of-the-art pose estimation solution that is faster and more accurate than OpenPose. It is now included in Pose2Sim for straightforward end-to-end analysis.
Open an Anaconda prompt or a terminal in a `Session`, `Participant`, or `Trial` folder.\
Type `ipython`.
``` python
from Pose2Sim import Pose2Sim
Pose2Sim.poseEstimation()
```
*N.B.:* The `GPU` will be used with ONNX backend if a valid CUDA installation is found (or MPS with MacOS), otherwise the `CPU` will be used with OpenVINO backend.\
*N.B.:* Pose estimation can be run in `lightweight`, `balanced`, or `performance` mode.\
*N.B.:* Pose estimation can be dramatically sped up by increasing the value of `det_frequency`. In that case, the detection is only done every `det_frequency` frames, and bounding boxes are tracked inbetween (keypoint detection is still performed on all frames).\
*N.B.:* Activating `tracking` will attempt to give consistent IDs to the same persons across frames, which might facilitate synchronization if other people are in the background.
 ### With MMPose *(coming soon)*:
> Coming soon
### With DeepLabCut:
> If you need to detect specific points on a human being, an animal, or an object, you can also train your own model with [DeepLabCut](https://github.com/DeepLabCut/DeepLabCut). In this case, Pose2Sim is used as an alternative to [AniPose](https://github.com/lambdaloop/anipose).
1. Train your DeepLabCut model and run it on your images or videos (more instruction on their repository)
2. Translate the h5 2D coordinates to json files (with `DLC_to_OpenPose.py` script, see [Utilities](#utilities)):
``` cmd
python -m DLC_to_OpenPose -i input_h5_file
```
3. Edit `pose.CUSTOM` in [Config.toml](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/S01_Demo_SingleTrial/Config.toml), and edit the node IDs so that they correspond to the column numbers of the 2D pose file, starting from zero. Make sure you also changed the `pose_model` and the `tracked_keypoint`.\
You can visualize your skeleton's hierarchy by changing pose_model to CUSTOM and writing these lines:
``` python
config_path = r'path_to_Config.toml'
import toml, anytree
config = toml.load(config_path)
pose_model = config.get('pose').get('pose_model')
model = anytree.importer.DictImporter().import_(config.get('pose').get(pose_model))
for pre, _, node in anytree.RenderTree(model):
print(f'{pre}{node.name} id={node.id}')
```
4. Create an OpenSim model if you need inverse kinematics.
### With OpenPose *(legacy)*:
> **N.B.: RTMlib is faster, more accurate, and easier to install than OpenPose. This is a legacy option.**\
> N.B.: OpenPose model files are apparently not available on their website anymore. Send me an email at dp2032@bath.ac.uk if you want me to forward them to you!
The accuracy and robustness of Pose2Sim have been thoroughly assessed only with OpenPose, BODY_25B model. Consequently, we recommend using this 2D pose estimation solution. See [OpenPose repository](https://github.com/CMU-Perceptual-Computing-Lab/openpose) for installation and running. *Windows portable demo is enough.*
* Open a command prompt in your **OpenPose** directory. \
Launch OpenPose for each `videos` folder:
``` cmd
bin\OpenPoseDemo.exe --model_pose BODY_25B --video
### With MMPose *(coming soon)*:
> Coming soon
### With DeepLabCut:
> If you need to detect specific points on a human being, an animal, or an object, you can also train your own model with [DeepLabCut](https://github.com/DeepLabCut/DeepLabCut). In this case, Pose2Sim is used as an alternative to [AniPose](https://github.com/lambdaloop/anipose).
1. Train your DeepLabCut model and run it on your images or videos (more instruction on their repository)
2. Translate the h5 2D coordinates to json files (with `DLC_to_OpenPose.py` script, see [Utilities](#utilities)):
``` cmd
python -m DLC_to_OpenPose -i input_h5_file
```
3. Edit `pose.CUSTOM` in [Config.toml](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/S01_Demo_SingleTrial/Config.toml), and edit the node IDs so that they correspond to the column numbers of the 2D pose file, starting from zero. Make sure you also changed the `pose_model` and the `tracked_keypoint`.\
You can visualize your skeleton's hierarchy by changing pose_model to CUSTOM and writing these lines:
``` python
config_path = r'path_to_Config.toml'
import toml, anytree
config = toml.load(config_path)
pose_model = config.get('pose').get('pose_model')
model = anytree.importer.DictImporter().import_(config.get('pose').get(pose_model))
for pre, _, node in anytree.RenderTree(model):
print(f'{pre}{node.name} id={node.id}')
```
4. Create an OpenSim model if you need inverse kinematics.
### With OpenPose *(legacy)*:
> **N.B.: RTMlib is faster, more accurate, and easier to install than OpenPose. This is a legacy option.**\
> N.B.: OpenPose model files are apparently not available on their website anymore. Send me an email at dp2032@bath.ac.uk if you want me to forward them to you!
The accuracy and robustness of Pose2Sim have been thoroughly assessed only with OpenPose, BODY_25B model. Consequently, we recommend using this 2D pose estimation solution. See [OpenPose repository](https://github.com/CMU-Perceptual-Computing-Lab/openpose) for installation and running. *Windows portable demo is enough.*
* Open a command prompt in your **OpenPose** directory. \
Launch OpenPose for each `videos` folder:
``` cmd
bin\OpenPoseDemo.exe --model_pose BODY_25B --video 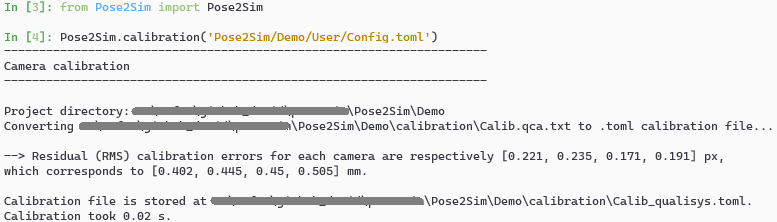
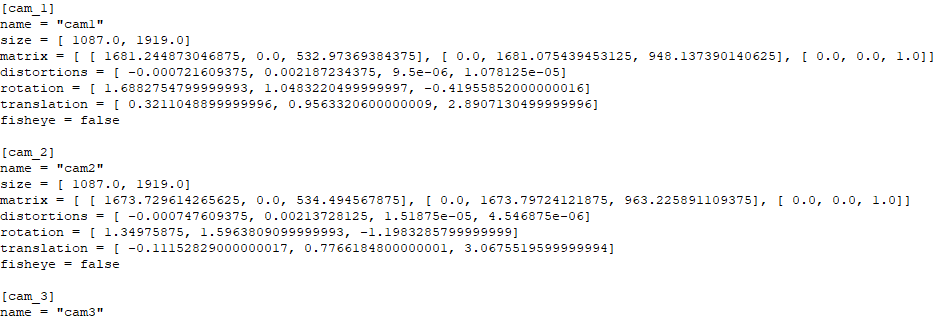 ### Convert from Qualisys, Optitrack, Vicon, OpenCap, EasyMocap, or bioCV
If you already have a calibration file, set `calibration_type` type to `convert` in your [Config.toml](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/Empty_project/User/Config.toml) file.
- **From [Qualisys](https://www.qualisys.com):**
- Export calibration to `.qca.txt` within QTM.
- Copy it in the `Calibration` Pose2Sim folder.
- set `convert_from` to 'qualisys' in your [Config.toml](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/S01_Demo_SingleTrial/Config.toml) file. Change `binning_factor` to 2 if you film in 540p.
- **From [Optitrack](https://optitrack.com/):** Exporting calibration will be available in Motive 3.2. In the meantime:
- Calculate intrinsics with a board (see next section).
- Use their C++ API [to retrieve extrinsic properties](https://docs.optitrack.com/developer-tools/motive-api/motive-api-function-reference#tt_cameraxlocation). Translation can be copied as is in your `Calib.toml` file, but TT_CameraOrientationMatrix first needs to be [converted to a Rodrigues vector](https://docs.opencv.org/3.4/d9/d0c/group__calib3d.html#ga61585db663d9da06b68e70cfbf6a1eac) with OpenCV. See instructions [here](https://github.com/perfanalytics/pose2sim/issues/28).
- Use the `Calib.toml` file as is and do not run Pose2Sim.calibration()
- **From [Vicon](http://www.vicon.com/Software/Nexus):**
- Copy your `.xcp` Vicon calibration file to the Pose2Sim `Calibration` folder.
- set `convert_from` to 'vicon' in your [Config.toml](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/S01_Demo_SingleTrial/Config.toml) file. No other setting is needed.
- **From [OpenCap](https://www.opencap.ai/):**
- Copy your `.pickle` OpenCap calibration files to the Pose2Sim `Calibration` folder.
- set `convert_from` to 'opencap' in your [Config.toml](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/S01_Demo_SingleTrial/Config.toml) file. No other setting is needed.
- **From [EasyMocap](https://github.com/zju3dv/EasyMocap/):**
- Copy your `intri.yml` and `extri.yml` files to the Pose2Sim `Calibration` folder.
- set `convert_from` to 'easymocap' in your [Config.toml](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/S01_Demo_SingleTrial/Config.toml) file. No other setting is needed.
- **From [bioCV](https://github.com/camera-mc-dev/.github/blob/main/profile/mocapPipe.md):**
- Copy your bioCV calibration files (no extension) to the Pose2Sim `Calibration` folder.
- set `convert_from` to 'biocv' in your [Config.toml](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/S01_Demo_SingleTrial/Config.toml) file. No other setting is needed.
- **From [AniPose](https://github.com/lambdaloop/anipose) or [FreeMocap](https://github.com/freemocap/freemocap):**
- Copy your `.toml` calibration file to the Pose2Sim `Calibration` folder.
- Calibration can be skipped since Pose2Sim uses the same [Aniposelib](https://anipose.readthedocs.io/en/latest/aniposelibtutorial.html) format.
### Calculate from scratch
> _**Calculate calibration parameters with a checkerboard, with measurements on the scene, or automatically with detected keypoints.**_\
> Take heart, it is not that complicated once you get the hang of it!
> *N.B.:* Try the calibration tool on the Demo by changing `calibration_type` to `calculate` in [Config.toml](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/S00_Demo_BatchSession/Config.toml).\
For the sake of practicality, there are voluntarily few board images for intrinsic calibration, and few points to click for extrinsic calibration. In spite of this, your reprojection error should be under 1-2 cm, which [does not hinder the quality of kinematic results in practice](https://www.mdpi.com/1424-8220/21/19/6530/htm#:~:text=Angle%20results%20were,Table%203).).
- **Calculate intrinsic parameters with a checkerboard:**
> *N.B.:* _Intrinsic parameters:_ camera properties (focal length, optical center, distortion), usually need to be calculated only once in their lifetime. In theory, cameras with same model and same settings will have identical intrinsic parameters.\
> *N.B.:* If you already calculated intrinsic parameters earlier, you can skip this step by setting `overwrite_intrinsics` to false.
- Create a folder for each camera in your `Calibration\intrinsics` folder.
- For each camera, film a checkerboard or a charucoboard. Either the board or the camera can be moved.
- Adjust parameters in the [Config.toml](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/S00_Demo_BatchSession/Config.toml) file.
- Make sure that the board:
- is filmed from different angles, covers a large part of the video frame, and is in focus.
- is flat, without reflections, surrounded by a wide white border, and is not rotationally invariant (Nrows ≠ Ncols, and Nrows odd if Ncols even). Go to [calib.io](https://calib.io/pages/camera-calibration-pattern-generator) to generate a suitable checkerboard.
- A common error is to specify the external, instead of the internal number of corners (one less than the count from calib.io). This may be one less than you would intuitively think.
### Convert from Qualisys, Optitrack, Vicon, OpenCap, EasyMocap, or bioCV
If you already have a calibration file, set `calibration_type` type to `convert` in your [Config.toml](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/Empty_project/User/Config.toml) file.
- **From [Qualisys](https://www.qualisys.com):**
- Export calibration to `.qca.txt` within QTM.
- Copy it in the `Calibration` Pose2Sim folder.
- set `convert_from` to 'qualisys' in your [Config.toml](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/S01_Demo_SingleTrial/Config.toml) file. Change `binning_factor` to 2 if you film in 540p.
- **From [Optitrack](https://optitrack.com/):** Exporting calibration will be available in Motive 3.2. In the meantime:
- Calculate intrinsics with a board (see next section).
- Use their C++ API [to retrieve extrinsic properties](https://docs.optitrack.com/developer-tools/motive-api/motive-api-function-reference#tt_cameraxlocation). Translation can be copied as is in your `Calib.toml` file, but TT_CameraOrientationMatrix first needs to be [converted to a Rodrigues vector](https://docs.opencv.org/3.4/d9/d0c/group__calib3d.html#ga61585db663d9da06b68e70cfbf6a1eac) with OpenCV. See instructions [here](https://github.com/perfanalytics/pose2sim/issues/28).
- Use the `Calib.toml` file as is and do not run Pose2Sim.calibration()
- **From [Vicon](http://www.vicon.com/Software/Nexus):**
- Copy your `.xcp` Vicon calibration file to the Pose2Sim `Calibration` folder.
- set `convert_from` to 'vicon' in your [Config.toml](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/S01_Demo_SingleTrial/Config.toml) file. No other setting is needed.
- **From [OpenCap](https://www.opencap.ai/):**
- Copy your `.pickle` OpenCap calibration files to the Pose2Sim `Calibration` folder.
- set `convert_from` to 'opencap' in your [Config.toml](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/S01_Demo_SingleTrial/Config.toml) file. No other setting is needed.
- **From [EasyMocap](https://github.com/zju3dv/EasyMocap/):**
- Copy your `intri.yml` and `extri.yml` files to the Pose2Sim `Calibration` folder.
- set `convert_from` to 'easymocap' in your [Config.toml](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/S01_Demo_SingleTrial/Config.toml) file. No other setting is needed.
- **From [bioCV](https://github.com/camera-mc-dev/.github/blob/main/profile/mocapPipe.md):**
- Copy your bioCV calibration files (no extension) to the Pose2Sim `Calibration` folder.
- set `convert_from` to 'biocv' in your [Config.toml](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/S01_Demo_SingleTrial/Config.toml) file. No other setting is needed.
- **From [AniPose](https://github.com/lambdaloop/anipose) or [FreeMocap](https://github.com/freemocap/freemocap):**
- Copy your `.toml` calibration file to the Pose2Sim `Calibration` folder.
- Calibration can be skipped since Pose2Sim uses the same [Aniposelib](https://anipose.readthedocs.io/en/latest/aniposelibtutorial.html) format.
### Calculate from scratch
> _**Calculate calibration parameters with a checkerboard, with measurements on the scene, or automatically with detected keypoints.**_\
> Take heart, it is not that complicated once you get the hang of it!
> *N.B.:* Try the calibration tool on the Demo by changing `calibration_type` to `calculate` in [Config.toml](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/S00_Demo_BatchSession/Config.toml).\
For the sake of practicality, there are voluntarily few board images for intrinsic calibration, and few points to click for extrinsic calibration. In spite of this, your reprojection error should be under 1-2 cm, which [does not hinder the quality of kinematic results in practice](https://www.mdpi.com/1424-8220/21/19/6530/htm#:~:text=Angle%20results%20were,Table%203).).
- **Calculate intrinsic parameters with a checkerboard:**
> *N.B.:* _Intrinsic parameters:_ camera properties (focal length, optical center, distortion), usually need to be calculated only once in their lifetime. In theory, cameras with same model and same settings will have identical intrinsic parameters.\
> *N.B.:* If you already calculated intrinsic parameters earlier, you can skip this step by setting `overwrite_intrinsics` to false.
- Create a folder for each camera in your `Calibration\intrinsics` folder.
- For each camera, film a checkerboard or a charucoboard. Either the board or the camera can be moved.
- Adjust parameters in the [Config.toml](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/S00_Demo_BatchSession/Config.toml) file.
- Make sure that the board:
- is filmed from different angles, covers a large part of the video frame, and is in focus.
- is flat, without reflections, surrounded by a wide white border, and is not rotationally invariant (Nrows ≠ Ncols, and Nrows odd if Ncols even). Go to [calib.io](https://calib.io/pages/camera-calibration-pattern-generator) to generate a suitable checkerboard.
- A common error is to specify the external, instead of the internal number of corners (one less than the count from calib.io). This may be one less than you would intuitively think.
 ***Intrinsic calibration error should be below 0.5 px.***
- **Calculate extrinsic parameters:**
> *N.B.:* _Extrinsic parameters:_ camera placement in space (position and orientation), need to be calculated every time a camera is moved. Can be calculated from a board, or from points in the scene with known coordinates.\
> *N.B.:* If there is no measurable item in the scene, you can temporarily bring something in (a table, for example), perform calibration, and then remove it before you start capturing motion.
- Create a folder for each camera in your `Calibration\extrinsics` folder.
- Once your cameras are in place, shortly film either a board laid on the floor, or the raw scene\
(only one frame is needed, but do not just take a photo unless you are sure it does not change the image format).
- Adjust parameters in the [Config.toml](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/S00_Demo_BatchSession/Config.toml) file.
- Then,
- **With a checkerboard:**\
Make sure that it is seen by all cameras. \
It should preferably be larger than the one used for intrinsics, as results will not be very accurate out of the covered zone.
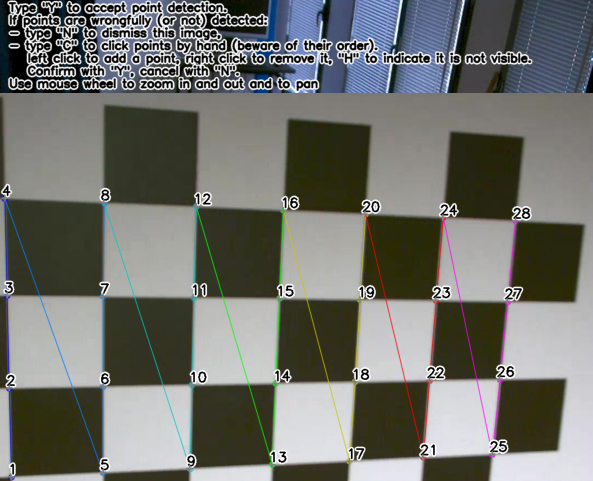
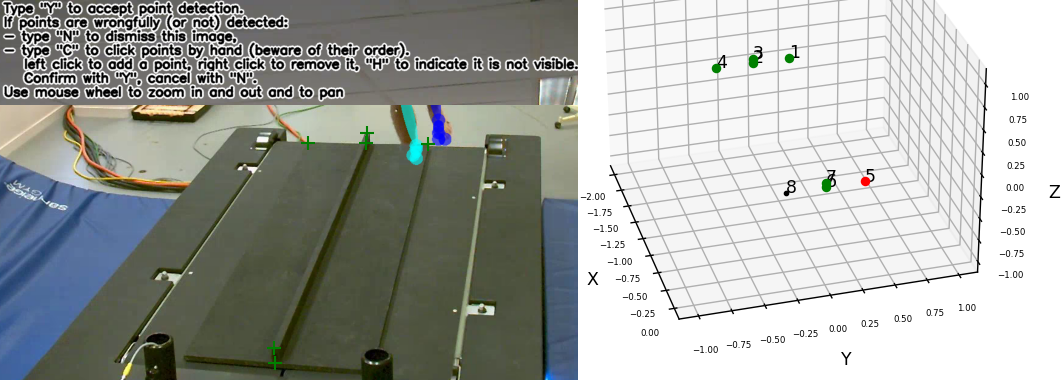
- **With scene measurements** (more flexible and potentially more accurate if points are spread out):\
Manually measure the 3D coordinates of 10 or more points in the scene (tiles, lines on wall, boxes, treadmill dimensions...). These points should be as spread out as possible. Replace `object_coords_3d` by these coordinates in Config.toml.\
Then you will click on the corresponding image points for each view.
- **With keypoints:**\
For a more automatic calibration, OpenPose keypoints could also be used for calibration.\
**COMING SOON!**
***Intrinsic calibration error should be below 0.5 px.***
- **Calculate extrinsic parameters:**
> *N.B.:* _Extrinsic parameters:_ camera placement in space (position and orientation), need to be calculated every time a camera is moved. Can be calculated from a board, or from points in the scene with known coordinates.\
> *N.B.:* If there is no measurable item in the scene, you can temporarily bring something in (a table, for example), perform calibration, and then remove it before you start capturing motion.
- Create a folder for each camera in your `Calibration\extrinsics` folder.
- Once your cameras are in place, shortly film either a board laid on the floor, or the raw scene\
(only one frame is needed, but do not just take a photo unless you are sure it does not change the image format).
- Adjust parameters in the [Config.toml](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/S00_Demo_BatchSession/Config.toml) file.
- Then,
- **With a checkerboard:**\
Make sure that it is seen by all cameras. \
It should preferably be larger than the one used for intrinsics, as results will not be very accurate out of the covered zone.
- **With scene measurements** (more flexible and potentially more accurate if points are spread out):\
Manually measure the 3D coordinates of 10 or more points in the scene (tiles, lines on wall, boxes, treadmill dimensions...). These points should be as spread out as possible. Replace `object_coords_3d` by these coordinates in Config.toml.\
Then you will click on the corresponding image points for each view.
- **With keypoints:**\
For a more automatic calibration, OpenPose keypoints could also be used for calibration.\
**COMING SOON!**
 ***Extrinsic calibration error should be below 1 cm, but depending on your application, results will still be potentially acceptable up to 2.5 cm.***
## Synchronizing, Tracking, Triangulating, Filtering
### Synchronization
> _**Cameras need to be synchronized, so that 2D points correspond to the same position across cameras.**_\
***N.B.:** Skip this step if your cameras are natively synchronized.*
Open an Anaconda prompt or a terminal in a `Session`, `Participant`, or `Trial` folder.\
Type `ipython`.
``` python
from Pose2Sim import Pose2Sim
Pose2Sim.synchronization()
```
For each camera, this computes mean vertical speed for the chosen keypoints, and finds the time offset for which their correlation is highest.\
All keypoints can be taken into account, or a subset of them. The user can also specify a time for each camera when only one participant is in the scene, preferably performing a clear vertical motion.
*N.B.:* Works best when only one participant is in the scene, at a roughly equal distance from all cameras and when the capture is at least 5-10 seconds long.
*N.B.:* Alternatively, use a flashlight, a clap, or a clear event to synchronize cameras. GoPro cameras can also be synchronized with a timecode, by GPS (outdoors) or with their app (slightly less reliable).
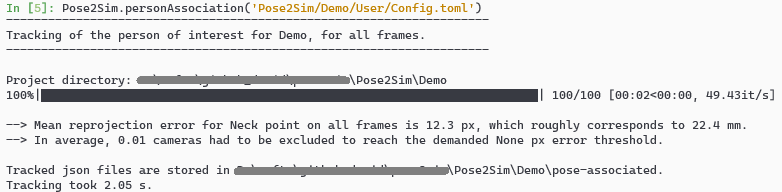
### Associate persons across cameras
> _**If `multi_person` is set to `false`, the algorithm chooses the person for whom the reprojection error is smallest.\
If `multi_person` is set to `true`, it associates across views the people for whom the distances between epipolar lines are the smallest. People are then associated across frames according to their displacement speed.**_ \
***N.B.:** Skip this step if only one person is in the field of view.*
Open an Anaconda prompt or a terminal in a `Session`, `Participant`, or `Trial` folder.\
Type `ipython`.
``` python
from Pose2Sim import Pose2Sim
Pose2Sim.personAssociation()
```
Check printed output. If results are not satisfying, try and release the constraints in the [Config.toml](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/S00_Demo_Session/Config.toml) file.
Output:\
***Extrinsic calibration error should be below 1 cm, but depending on your application, results will still be potentially acceptable up to 2.5 cm.***
## Synchronizing, Tracking, Triangulating, Filtering
### Synchronization
> _**Cameras need to be synchronized, so that 2D points correspond to the same position across cameras.**_\
***N.B.:** Skip this step if your cameras are natively synchronized.*
Open an Anaconda prompt or a terminal in a `Session`, `Participant`, or `Trial` folder.\
Type `ipython`.
``` python
from Pose2Sim import Pose2Sim
Pose2Sim.synchronization()
```
For each camera, this computes mean vertical speed for the chosen keypoints, and finds the time offset for which their correlation is highest.\
All keypoints can be taken into account, or a subset of them. The user can also specify a time for each camera when only one participant is in the scene, preferably performing a clear vertical motion.
*N.B.:* Works best when only one participant is in the scene, at a roughly equal distance from all cameras and when the capture is at least 5-10 seconds long.
*N.B.:* Alternatively, use a flashlight, a clap, or a clear event to synchronize cameras. GoPro cameras can also be synchronized with a timecode, by GPS (outdoors) or with their app (slightly less reliable).
### Associate persons across cameras
> _**If `multi_person` is set to `false`, the algorithm chooses the person for whom the reprojection error is smallest.\
If `multi_person` is set to `true`, it associates across views the people for whom the distances between epipolar lines are the smallest. People are then associated across frames according to their displacement speed.**_ \
***N.B.:** Skip this step if only one person is in the field of view.*
Open an Anaconda prompt or a terminal in a `Session`, `Participant`, or `Trial` folder.\
Type `ipython`.
``` python
from Pose2Sim import Pose2Sim
Pose2Sim.personAssociation()
```
Check printed output. If results are not satisfying, try and release the constraints in the [Config.toml](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/S00_Demo_Session/Config.toml) file.
Output:\
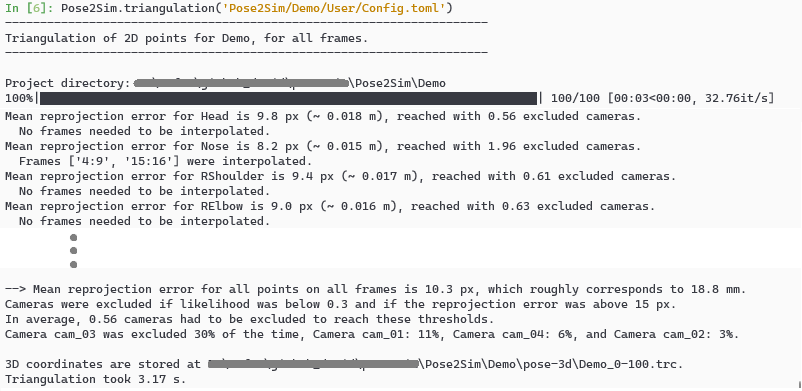
 ### Triangulating keypoints
> _**Triangulate your 2D coordinates in a robust way.**_ \
> The triangulation is weighted by the likelihood of each detected 2D keypoint, provided that they this likelihood is above a threshold.\
If the reprojection error is above another threshold, right and left sides are swapped; if it is still above, cameras are removed until the threshold is met. If more cameras are removed than a predefined number, triangulation is skipped for this point and this frame. In the end, missing values are interpolated.
Open an Anaconda prompt or a terminal in a `Session`, `Participant`, or `Trial` folder.\
Type `ipython`.
``` python
from Pose2Sim import Pose2Sim
Pose2Sim.triangulation()
```
Check printed output, and visualize your trc in OpenSim: `File -> Preview experimental data`.\
If your triangulation is not satisfying, try and release the constraints in the `Config.toml` file.
Output:\
### Triangulating keypoints
> _**Triangulate your 2D coordinates in a robust way.**_ \
> The triangulation is weighted by the likelihood of each detected 2D keypoint, provided that they this likelihood is above a threshold.\
If the reprojection error is above another threshold, right and left sides are swapped; if it is still above, cameras are removed until the threshold is met. If more cameras are removed than a predefined number, triangulation is skipped for this point and this frame. In the end, missing values are interpolated.
Open an Anaconda prompt or a terminal in a `Session`, `Participant`, or `Trial` folder.\
Type `ipython`.
``` python
from Pose2Sim import Pose2Sim
Pose2Sim.triangulation()
```
Check printed output, and visualize your trc in OpenSim: `File -> Preview experimental data`.\
If your triangulation is not satisfying, try and release the constraints in the `Config.toml` file.
Output:\
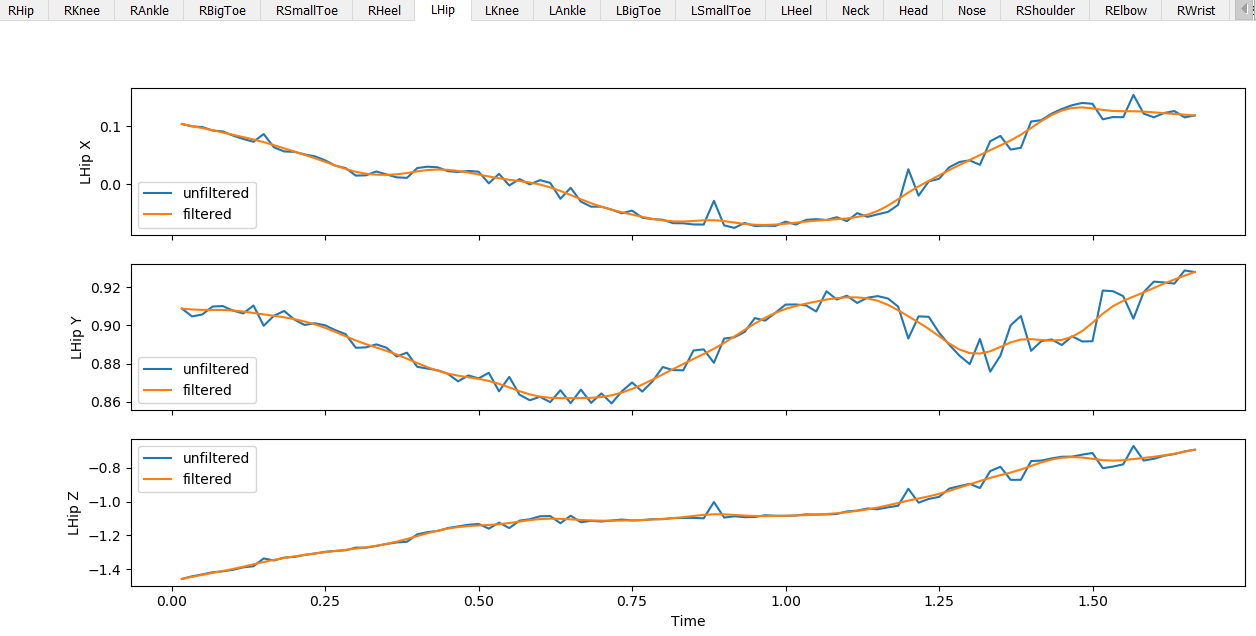
 ### Filtering 3D coordinates
> _**Filter your 3D coordinates.**_\
> Numerous filter types are provided, and can be tuned accordingly.
Open an Anaconda prompt or a terminal in a `Session`, `Participant`, or `Trial` folder.\
Type `ipython`.
``` python
from Pose2Sim import Pose2Sim
Pose2Sim.filtering()
```
Check your filtration with the displayed figures, and visualize your .trc file in OpenSim. If your filtering is not satisfying, try and change the parameters in the `Config.toml` file.
Output:\
### Filtering 3D coordinates
> _**Filter your 3D coordinates.**_\
> Numerous filter types are provided, and can be tuned accordingly.
Open an Anaconda prompt or a terminal in a `Session`, `Participant`, or `Trial` folder.\
Type `ipython`.
``` python
from Pose2Sim import Pose2Sim
Pose2Sim.filtering()
```
Check your filtration with the displayed figures, and visualize your .trc file in OpenSim. If your filtering is not satisfying, try and change the parameters in the `Config.toml` file.
Output:\
 ### Marker Augmentation
> _**Use the Stanford LSTM model to estimate the position of 47 virtual markers.**_\
_**Note that inverse kinematic results are not necessarily better after marker augmentation.**_ Skip if results are not convincing.
*N.B.:* Marker augmentation tends to give a more stable, but less precise output. In practice, it is mostly beneficial when using less than 4 cameras.
**Make sure that `participant_height` is correct in your `Config.toml` file.** `participant_mass` is mostly optional for IK.\
Only works with models estimating at least the following keypoints (e.g., not COCO):
``` python
["Neck", "RShoulder", "LShoulder", "RHip", "LHip", "RKnee", "LKnee",
"RAnkle", "LAnkle", "RHeel", "LHeel", "RSmallToe", "LSmallToe",
"RBigToe", "LBigToe", "RElbow", "LElbow", "RWrist", "LWrist"]
```
Will not work properly if missing values are not interpolated (i.e., if there are Nan value in the .trc file).
Open an Anaconda prompt or a terminal in a `Session`, `Participant`, or `Trial` folder.\
Type `ipython`.
``` python
from Pose2Sim import Pose2Sim
Pose2Sim.markerAugmentation()
```
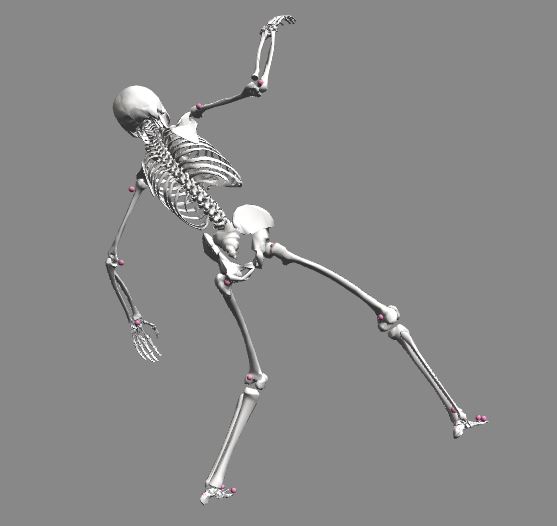
## OpenSim kinematics
> _**Obtain 3D joint angles.**_\
> Your OpenSim .osim scaled model and .mot inverse kinematic results will be found in the OpenSim folder of your `Participant` directory.
### OpenSim Scaling
1. Choose a time range where the 3D keypoints are particularly well reconstructed, or capture a static pose, typically an A-pose...
2. Open OpenSim.
3. Open the provided `Model_Pose2Sim_LSTM.osim` model from `Pose2Sim/OpenSim_Setup`. *(File -> Open Model)*
4. Load the provided `Scaling_Setup_Pose2Sim_LSTM.xml` scaling file. *(Tools -> Scale model -> Load)*
5. Replace the example .trc file with your own data.
6. Run
7. Save the new scaled OpenSim model.
### OpenSim Inverse kinematics
1. Load the provided `IK_Setup_Pose2Sim_LSTM.xml` scaling file from `Pose2Sim/OpenSim_Setup`. *(Tools -> Inverse kinematics -> Load)*
2. Replace the example .trc file with your own data, and specify the path to your angle kinematics output file.
3. Run.
### Command line
Alternatively, you can use command-line tools:
``` python
import opensim
opensim.ScaleTool("
### Marker Augmentation
> _**Use the Stanford LSTM model to estimate the position of 47 virtual markers.**_\
_**Note that inverse kinematic results are not necessarily better after marker augmentation.**_ Skip if results are not convincing.
*N.B.:* Marker augmentation tends to give a more stable, but less precise output. In practice, it is mostly beneficial when using less than 4 cameras.
**Make sure that `participant_height` is correct in your `Config.toml` file.** `participant_mass` is mostly optional for IK.\
Only works with models estimating at least the following keypoints (e.g., not COCO):
``` python
["Neck", "RShoulder", "LShoulder", "RHip", "LHip", "RKnee", "LKnee",
"RAnkle", "LAnkle", "RHeel", "LHeel", "RSmallToe", "LSmallToe",
"RBigToe", "LBigToe", "RElbow", "LElbow", "RWrist", "LWrist"]
```
Will not work properly if missing values are not interpolated (i.e., if there are Nan value in the .trc file).
Open an Anaconda prompt or a terminal in a `Session`, `Participant`, or `Trial` folder.\
Type `ipython`.
``` python
from Pose2Sim import Pose2Sim
Pose2Sim.markerAugmentation()
```
## OpenSim kinematics
> _**Obtain 3D joint angles.**_\
> Your OpenSim .osim scaled model and .mot inverse kinematic results will be found in the OpenSim folder of your `Participant` directory.
### OpenSim Scaling
1. Choose a time range where the 3D keypoints are particularly well reconstructed, or capture a static pose, typically an A-pose...
2. Open OpenSim.
3. Open the provided `Model_Pose2Sim_LSTM.osim` model from `Pose2Sim/OpenSim_Setup`. *(File -> Open Model)*
4. Load the provided `Scaling_Setup_Pose2Sim_LSTM.xml` scaling file. *(Tools -> Scale model -> Load)*
5. Replace the example .trc file with your own data.
6. Run
7. Save the new scaled OpenSim model.
### OpenSim Inverse kinematics
1. Load the provided `IK_Setup_Pose2Sim_LSTM.xml` scaling file from `Pose2Sim/OpenSim_Setup`. *(Tools -> Inverse kinematics -> Load)*
2. Replace the example .trc file with your own data, and specify the path to your angle kinematics output file.
3. Run.
### Command line
Alternatively, you can use command-line tools:
``` python
import opensim
opensim.ScaleTool("Converting pose files (CLICK TO SHOW)
[Blazepose_runsave.py](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/Utilities/Blazepose_runsave.py) Runs BlazePose on a video, and saves coordinates in OpenPose (json) or DeepLabCut (h5 or csv) format. [DLC_to_OpenPose.py](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/Utilities/DLC_to_OpenPose.py) Converts a DeepLabCut (h5) 2D pose estimation file into OpenPose (json) files. [AlphaPose_to_OpenPose.py](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/Utilities/AlphaPose_to_OpenPose.py) Converts AlphaPose single json file to OpenPose frame-by-frame files.
Converting calibration files (CLICK TO SHOW)
[calib_toml_to_easymocap.py](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/Utilities/calib_toml_to_easymocap.py) Converts an OpenCV .toml calibration file to EasyMocap intrinsic and extrinsic .yml calibration files. [calib_easymocap_to_toml.py](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/Utilities/calib_easymocap_to_toml.py) Converts EasyMocap intrinsic and extrinsic .yml calibration files to an OpenCV .toml calibration file. [calib_from_checkerboard.py](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/Utilities/calib_from_checkerboard.py) Calibrates cameras with images or a video of a checkerboard, saves calibration in a Pose2Sim .toml calibration file. You should probably use Pose2Sim.calibration() instead, which is much easier and better. [calib_qca_to_toml.py](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/Utilities/calib_qca_to_toml.py) Converts a Qualisys .qca.txt calibration file to the Pose2Sim .toml calibration file (similar to what is used in [AniPose](https://anipose.readthedocs.io/en/latest/)). [calib_toml_to_qca.py](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/Utilities/calib_toml_to_qca.py) Converts a Pose2Sim .toml calibration file (e.g., from a checkerboard) to a Qualisys .qca.txt calibration file. [calib_toml_to_opencap.py](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/Utilities/calib_toml_to_opencap.py) Converts an OpenCV .toml calibration file to OpenCap .pickle calibration files. [calib_toml_to_opencap.py]( ) To convert OpenCap calibration tiles to a .toml file, please use Pose2Sim.calibration() and set convert_from = 'opencap' in Config.toml.
Plotting tools (CLICK TO SHOW)
[json_display_with_img.py](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/Utilities/json_display_with_img.py) Overlays 2D detected json coordinates on original raw images. High confidence keypoints are green, low confidence ones are red. [json_display_without_img.py](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/Utilities/json_display_without_img.py) Plots an animation of 2D detected json coordinates. [trc_plot.py](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/Utilities/trc_plot.py) Displays X, Y, Z coordinates of each 3D keypoint of a TRC file in a different matplotlib tab.
Other trc tools (CLICK TO SHOW)
[trc_from_easymocap.py](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/Utilities/trc_from_easymocap.py) Convert EasyMocap results keypoints3d .json files to .trc. [c3d_to_trc.py](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/Utilities/c3d_to_trc.py) Converts 3D point data from a .c3d file to a .trc file compatible with OpenSim. No analog data (force plates, emg) nor computed data (angles, powers, etc.) are retrieved. [trc_to_c3d.py](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/Utilities/trc_to_c3d.py) Converts 3D point data from a .trc file to a .c3d file compatible with Visual3D. [trc_desample.py](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/Utilities/trc_desample.py) Undersamples a trc file. [trc_Zup_to_Yup.py](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/Utilities/trc_Zup_to_Yup.py) Changes Z-up system coordinates to Y-up system coordinates. [trc_filter.py](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/Utilities/trc_filter.py) Filters trc files. Available filters: Butterworth, Kalman, Butterworth on speed, Gaussian, LOESS, Median. [trc_gaitevents.py](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/Utilities/trc_gaitevents.py) Detects gait events from point coordinates according to [Zeni et al. (2008)](https://www.sciencedirect.com/science/article/abs/pii/S0966636207001804?via%3Dihub). [trc_combine.py](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/Utilities/trc_combine.py) Combine two trc files, for example a triangulated DeepLabCut trc file and a triangulated OpenPose trc file. [trc_from_mot_osim.py](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/Utilities/trc_from_mot_osim.py) Build a trc file from a .mot motion file and a .osim model file. [bodykin_from_mot_osim.py](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/Utilities/bodykin_from_mot_osim.py) Converts a mot file to a .csv file with rotation and orientation of all segments. [reproj_from_trc_calib.py](https://github.com/perfanalytics/pose2sim/blob/main/Pose2Sim/Utilities/reproj_from_trc_calib.py) Reprojects 3D coordinates of a trc file to the image planes defined by a calibration file. Output in OpenPose or DeepLabCut format.
 # How to cite and how to contribute
### How to cite
If you use this code or data, please cite [Pagnon et al., 2022b](https://doi.org/10.21105/joss.04362), [Pagnon et al., 2022a](https://www.mdpi.com/1424-8220/22/7/2712), or [Pagnon et al., 2021](https://www.mdpi.com/1424-8220/21/19/6530).
@Article{Pagnon_2022_JOSS,
AUTHOR = {Pagnon, David and Domalain, Mathieu and Reveret, Lionel},
TITLE = {Pose2Sim: An open-source Python package for multiview markerless kinematics},
JOURNAL = {Journal of Open Source Software},
YEAR = {2022},
DOI = {10.21105/joss.04362},
URL = {https://joss.theoj.org/papers/10.21105/joss.04362}
}
@Article{Pagnon_2022_Accuracy,
AUTHOR = {Pagnon, David and Domalain, Mathieu and Reveret, Lionel},
TITLE = {Pose2Sim: An End-to-End Workflow for 3D Markerless Sports Kinematics—Part 2: Accuracy},
JOURNAL = {Sensors},
YEAR = {2022},
DOI = {10.3390/s22072712},
URL = {https://www.mdpi.com/1424-8220/22/7/2712}
}
@Article{Pagnon_2021_Robustness,
AUTHOR = {Pagnon, David and Domalain, Mathieu and Reveret, Lionel},
TITLE = {Pose2Sim: An End-to-End Workflow for 3D Markerless Sports Kinematics—Part 1: Robustness},
JOURNAL = {Sensors},
YEAR = {2021},
DOI = {10.3390/s21196530},
URL = {https://www.mdpi.com/1424-8220/21/19/6530}
}
### How to contribute and to-do list
I would happily welcome any proposal for new features, code improvement, and more!\
If you want to contribute to Pose2Sim, please see [this issue](https://github.com/perfanalytics/pose2sim/issues/40).\
You will be proposed a to-do list, but please feel absolutely free to propose your own ideas and improvements.
**Main to-do list**
- Graphical User Interface
- Synchronization
- Self-calibration based on keypoint detection
# How to cite and how to contribute
### How to cite
If you use this code or data, please cite [Pagnon et al., 2022b](https://doi.org/10.21105/joss.04362), [Pagnon et al., 2022a](https://www.mdpi.com/1424-8220/22/7/2712), or [Pagnon et al., 2021](https://www.mdpi.com/1424-8220/21/19/6530).
@Article{Pagnon_2022_JOSS,
AUTHOR = {Pagnon, David and Domalain, Mathieu and Reveret, Lionel},
TITLE = {Pose2Sim: An open-source Python package for multiview markerless kinematics},
JOURNAL = {Journal of Open Source Software},
YEAR = {2022},
DOI = {10.21105/joss.04362},
URL = {https://joss.theoj.org/papers/10.21105/joss.04362}
}
@Article{Pagnon_2022_Accuracy,
AUTHOR = {Pagnon, David and Domalain, Mathieu and Reveret, Lionel},
TITLE = {Pose2Sim: An End-to-End Workflow for 3D Markerless Sports Kinematics—Part 2: Accuracy},
JOURNAL = {Sensors},
YEAR = {2022},
DOI = {10.3390/s22072712},
URL = {https://www.mdpi.com/1424-8220/22/7/2712}
}
@Article{Pagnon_2021_Robustness,
AUTHOR = {Pagnon, David and Domalain, Mathieu and Reveret, Lionel},
TITLE = {Pose2Sim: An End-to-End Workflow for 3D Markerless Sports Kinematics—Part 1: Robustness},
JOURNAL = {Sensors},
YEAR = {2021},
DOI = {10.3390/s21196530},
URL = {https://www.mdpi.com/1424-8220/21/19/6530}
}
### How to contribute and to-do list
I would happily welcome any proposal for new features, code improvement, and more!\
If you want to contribute to Pose2Sim, please see [this issue](https://github.com/perfanalytics/pose2sim/issues/40).\
You will be proposed a to-do list, but please feel absolutely free to propose your own ideas and improvements.
**Main to-do list**
- Graphical User Interface
- Synchronization
- Self-calibration based on keypoint detection
Detailed GOT-DONE and TO-DO list (CLICK TO SHOW)
✔ **Pose:** Support OpenPose [body_25b](https://github.com/CMU-Perceptual-Computing-Lab/openpose_train/tree/master/experimental_models#body_25b-model---option-2-recommended) for more accuracy, [body_135](https://github.com/CMU-Perceptual-Computing-Lab/openpose_train/tree/master/experimental_models#single-network-whole-body-pose-estimation-model) for pronation/supination.
✔ **Pose:** Support [BlazePose](https://developers.google.com/mediapipe/solutions/vision/pose_landmarker) for faster inference (on mobile device).
✔ **Pose:** Support [DeepLabCut](http://www.mackenziemathislab.org/deeplabcut) for training on custom datasets.
✔ **Pose:** Support [AlphaPose](https://github.com/MVIG-SJTU/AlphaPose) as an alternative to OpenPose.
✔ **Pose:** Define custom model in config.toml rather than in skeletons.py.
▢ **Pose:** Support [MMPose](https://github.com/open-mmlab/mmpose), [SLEAP](https://sleap.ai/), etc.
▢ **Pose:** Integrate pose estimation within Pose2Sim (via MMPose).
▢ **Pose:** Directly reading from DeepLabCut .csv or .h5 files instead of converting to .json (triangulation, person association, calibration, synchronization...)
▢ **Pose:** GUI help for DeepLabCut model creation.
✔ **Calibration:** Convert [Qualisys](https://www.qualisys.com) .qca.txt calibration file.
✔ **Calibration:** Convert [Optitrack](https://optitrack.com/) extrinsic calibration file.
✔ **Calibration:** Convert [Vicon](http://www.vicon.com/Software/Nexus) .xcp calibration file.
✔ **Calibration:** Convert [OpenCap](https://www.opencap.ai/) .pickle calibration files.
✔ **Calibration:** Convert [EasyMocap](https://github.com/zju3dv/EasyMocap/) .yml calibration files.
✔ **Calibration:** Convert [bioCV](https://github.com/camera-mc-dev/.github/blob/main/profile/mocapPipe.md) calibration files.
✔ **Calibration:** Easier and clearer calibration procedure: separate intrinsic and extrinsic parameter calculation, edit corner detection if some are wrongly detected (or not visible).
✔ **Calibration:** Possibility to evaluate extrinsic parameters from cues on scene.
▢ **Calibration:** Once object points have been detected or clicked once, track them for live calibration of moving cameras. Propose to click again when they are lost.
▢ **Calibration:** Calibrate cameras by pairs and compute average extrinsic calibration with [aniposelib](https://github.com/lambdaloop/aniposelib/blob/d03b485c4e178d7cff076e9fe1ac36837db49158/aniposelib/utils.py#L167).
▢ **Calibration:** Fine-tune calibration with bundle adjustment.
▢ **Calibration:** Support ChArUco board detection (see [there](https://mecaruco2.readthedocs.io/en/latest/notebooks_rst/Aruco/sandbox/ludovic/aruco_calibration_rotation.html)).
▢ **Calibration:** Calculate calibration with points rather than board. (1) SBA calibration with wand (cf [Argus](https://argus.web.unc.edu), see converter [here](https://github.com/backyardbiomech/DLCconverterDLT/blob/master/DLTcameraPosition.py)). Set world reference frame in the end.
▢ **Calibration:** Alternatively, self-calibrate with [OpenPose keypoints](https://ietresearch.onlinelibrary.wiley.com/doi/full/10.1049/cvi2.12130). Set world reference frame in the end.
▢ **Calibration:** Convert [fSpy calibration](https://fspy.io/) based on vanishing point.
✔ **Synchronization:** Synchronize cameras on keypoint speeds.
✔ **Person Association:** Automatically choose the main person to triangulate.
✔ **Person Association:** Multiple persons association. 1. Triangulate all the persons whose reprojection error is below a certain threshold (instead of only the one with minimum error), and then track in time with speed cf [Slembrouck 2020](https://link.springer.com/chapter/10.1007/978-3-030-40605-9_15)? or 2. Based on affinity matrices [Dong 2021](https://arxiv.org/pdf/1901.04111.pdf)? or 3. Based on occupancy maps [Yildiz 2012](https://link.springer.com/chapter/10.1007/978-3-642-35749-7_10)? or 4. With a neural network [Huang 2023](https://arxiv.org/pdf/2304.09471.pdf)?
✔ **Triangulation:** Triangulation weighted with confidence.
✔ **Triangulation:** Set a likelihood threshold below which a camera should not be used, a reprojection error threshold, and a minimum number of remaining cameras below which triangulation is skipped for this frame.
✔ **Triangulation:** Interpolate missing frames (cubic, bezier, linear, slinear, quadratic)
✔ **Triangulation:** Show mean reprojection error in px and in mm for each keypoint.
✔ **Triangulation:** Show how many cameras on average had to be excluded for each keypoint.
✔ **Triangulation:** Evaluate which cameras were the least reliable.
✔ **Triangulation:** Show which frames had to be interpolated for each keypoint.
✔ **Triangulation:** Solve limb swapping (although not really an issue with Body_25b). Try triangulating with opposite side if reprojection error too large. Alternatively, ignore right and left sides, use RANSAC or SDS triangulation, and then choose right or left by majority voting. More confidence can be given to cameras whose plane is the most coplanar to the right/left line.
✔ **Triangulation:** [Undistort](https://docs.opencv.org/3.4/da/d54/group__imgproc__transform.html#ga887960ea1bde84784e7f1710a922b93c) 2D points before triangulating (and [distort](https://github.com/lambdaloop/aniposelib/blob/d03b485c4e178d7cff076e9fe1ac36837db49158/aniposelib/cameras.py#L301) them before computing reprojection error).
✔ **Triangulation:** Offer the possibility to augment the triangulated data with [the OpenCap LSTM](https://github.com/stanfordnmbl/opencap-core/blob/main/utilsAugmenter.py). Create "BODY_25_AUGMENTED" model, Scaling_setup, IK_Setup.
✔ **Triangulation:** Multiple person kinematics (output multiple .trc coordinates files). Triangulate all persons with reprojection error above threshold, and identify them by minimizing their displacement across frames.
▢ **Triangulation:** Pre-compile weighted_triangulation and reprojection with @jit(nopython=True, parallel=True) for faster execution.
▢ **Triangulation:** Offer the possibility of triangulating with Sparse Bundle Adjustment (SBA), Extended Kalman Filter (EKF), Full Trajectory Estimation (FTE) (see [AcinoSet](https://github.com/African-Robotics-Unit/AcinoSet)).
▢ **Triangulation:** Implement normalized DLT and RANSAC triangulation, Outlier rejection (sliding z-score?), as well as a [triangulation refinement step](https://doi.org/10.1109/TMM.2022.3171102).
▢ **Triangulation:** Track hands and face (won't be taken into account in OpenSim at this stage).
✔ **Filtering:** Available filtering methods: Butterworth, Butterworth on speed, Gaussian, Median, LOESS (polynomial smoothing).
✔ **Filtering:** Implement Kalman filter and Kalman smoother.
▢ **Filtering:** Implement [smoothNet](https://github.com/perfanalytics/pose2sim/issues/29)
✔ **OpenSim:** Integrate better spine from [lifting fullbody model](https://pubmed.ncbi.nlm.nih.gov/30714401) to the [gait full-body model](https://nmbl.stanford.edu/wp-content/uploads/07505900.pdf), more accurate for the knee.
✔ **OpenSim:** Optimize model marker positions as compared to ground-truth marker-based positions.
✔ **OpenSim:** Add scaling and inverse kinematics setup files.
✔ **OpenSim:** Add full model with contact spheres ([SmoothSphereHalfSpaceForce](https://simtk.org/api_docs/opensim/api_docs/classOpenSim_1_1SmoothSphereHalfSpaceForce.html#details)) and full-body muscles ([DeGrooteFregly2016Muscle](https://simtk.org/api_docs/opensim/api_docs/classOpenSim_1_1DeGrooteFregly2016Muscle.html#details)), for [Moco](https://opensim-org.github.io/opensim-moco-site/) for example.
✔ **OpenSim:** Add model with [ISB shoulder](https://github.com/stanfordnmbl/opencap-core/blob/main/opensimPipeline/Models/LaiUhlrich2022_shoulder.osim).
▢ **OpenSim:** Integrate OpenSim in Pose2Sim.
▢ **OpenSim:** Do not require a separate scaling trial: scale on the 10 slowest frames of the moving trial instead.
▢ **OpenSim:** Implement optimal fixed-interval Kalman smoothing for inverse kinematics ([this OpenSim fork](https://github.com/antoinefalisse/opensim-core/blob/kalman_smoother/OpenSim/Tools/InverseKinematicsKSTool.cpp)), or [Biorbd](https://github.com/pyomeca/biorbd/blob/f776fe02e1472aebe94a5c89f0309360b52e2cbc/src/RigidBody/KalmanReconsMarkers.cpp))
✔ **GUI:** Blender add-on (cf [MPP2SOS](https://blendermarket.com/products/mocap-mpp2soss)), [Maya-Mocap](https://github.com/davidpagnon/Maya-Mocap) and [BlendOsim](https://github.com/JonathanCamargo/BlendOsim).
▢ **GUI:** App or webapp (e.g., with [Napari](https://napari.org/stable).
▢ **GUI:** 3D plot of cameras and of triangulated keypoints.
▢ **GUI:** Demo on Google Colab (see [Sports2D](https://bit.ly/Sports2D_Colab) for OpenPose and Python package installation on Google Drive).
✔ **Demo:** Provide Demo data for users to test the code.
✔ **Demo:** Add videos for users to experiment with other pose detection frameworks
✔ **Demo:** Time shift videos and json to demonstrate synchronization
✔ **Demo:** Add another virtual person to demonstrate personAssociation
▢ **Tutorials:** Make video tutorials.
▢ **Doc:** Use [Sphinx](https://www.sphinx-doc.org/en/master), [MkDocs](https://www.mkdocs.org), or (maybe better), [github.io](https://docs.github.com/fr/pages/quickstart) for clearer documentation.
✔ **Pip package**
✔ **Batch processing** (also enable non-batch processing)
✔ **Catch errors**
▢ **Conda package**
▢ **Docker image**
▢ Run pose estimation and OpenSim from within Pose2Sim
▢ Real-time: Run Pose estimation, Person association, Triangulation, Kalman filter, IK frame by frame (instead of running each step for all frames)
▢ Config parameter for non batch peocessing
▢ **Run from command line via click or typer**
▢ **Utilities**: Export other data from c3d files into .mot or .sto files (angles, powers, forces, moments, GRF, EMG...)
▢ **Utilities**: Create trc_to_c3d.py script
✔ **Bug:** calibration.py. FFMPEG error message when calibration files are images. See [there](https://github.com/perfanalytics/pose2sim/issues/33#:~:text=In%20order%20to%20check,filter%20this%20message%20yet.).
▢ **Bug:** common.py, class plotWindow(). Python crashes after a few runs of `Pose2Sim.filtering()` when `display_figures=true`. See [there](https://github.com/superjax/plotWindow/issues/7).