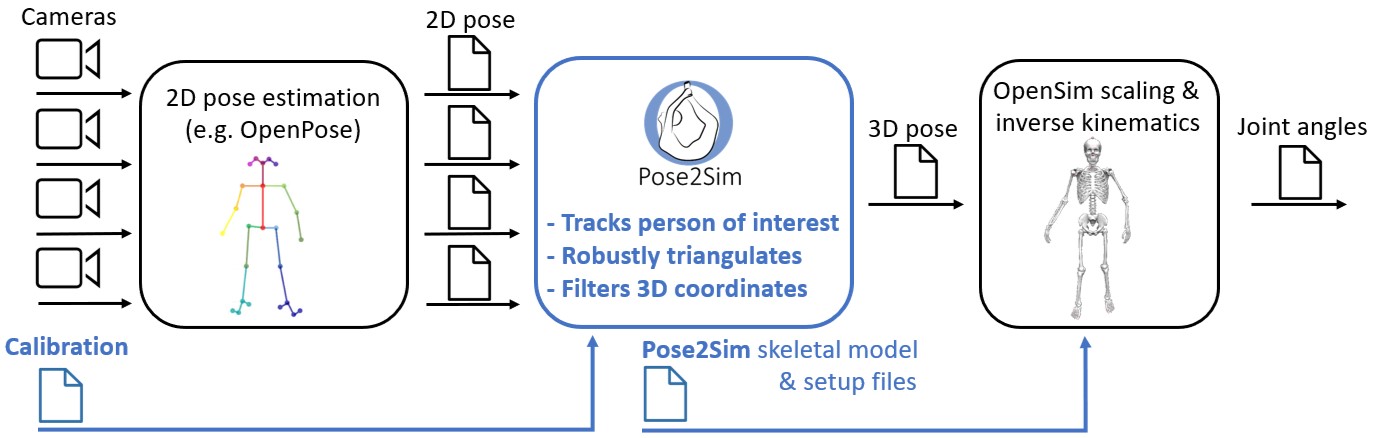
Pose2Sim stands for "OpenPose to OpenSim", as it uses OpenPose inputs (2D keypoints coordinates obtained from multiple videos) and leads to an OpenSim result (full-body 3D joint angles). Other 2D pose estimators such as BlazePose, DeeplLabCut, AlphaPose, etc. can now be used as inputs.
If you can only use one single camera and don't mind losing some accuracy, please consider using Sports2D.