2.1 KiB
EasyMoCap -> Real-time Visualization
We are the first one to release a real-time visualization tool for both skeletons and SMPL/SMPL+H/SMPL-X/MANO models.
Install
Please install EasyMocap first. This part requires Open3D==0.9.0:
python3 -m pip install open3d==0.9.0
Open the server
Before any visualization, you should run a server:
# quick start:
python3 apps/vis/vis_server.py --cfg config/vis3d/o3d_scene.yml
# If you want to specify the host and port:
python3 apps/vis/vis_server.py --cfg config/vis3d/o3d_scene.yml host <your_ip_address> port <set_a_port>
This step will open the visualization window:
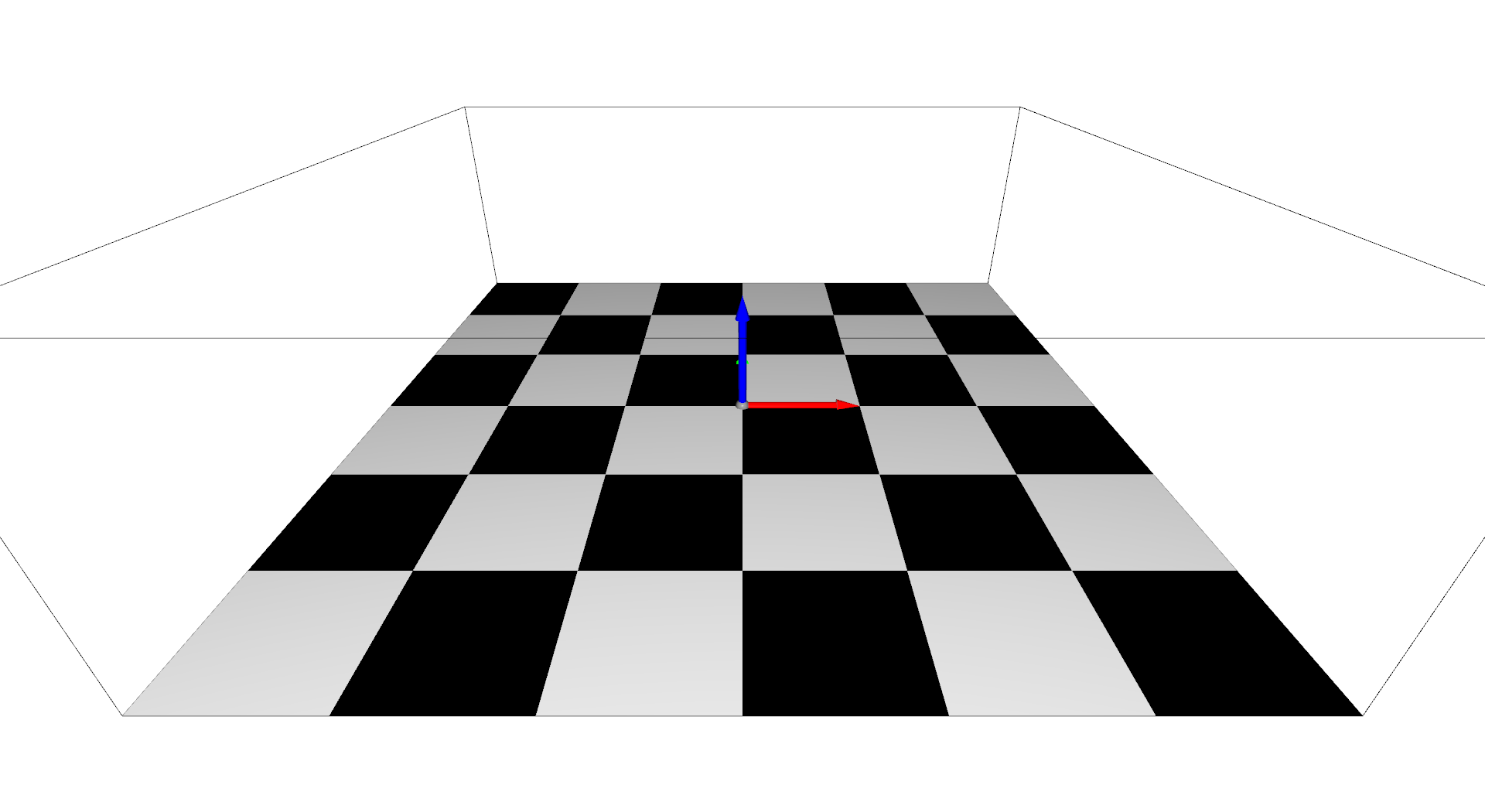
You can alternate the viewpoints free. The configuration file config/vis/o3d_scene.yml defines the scene and other properties. In the default setting, we define the xyz-axis in the origin, the bounding box of the scene and a chessboard in the ground.
Send the data
If you are success to open the server, you can visualize your 3D data anywhere. We provide an example code:
python3 apps/vis/vis_client.py --path <path/to/your/keypoints3d> --host <previous_ip_address> --port <previous_port>
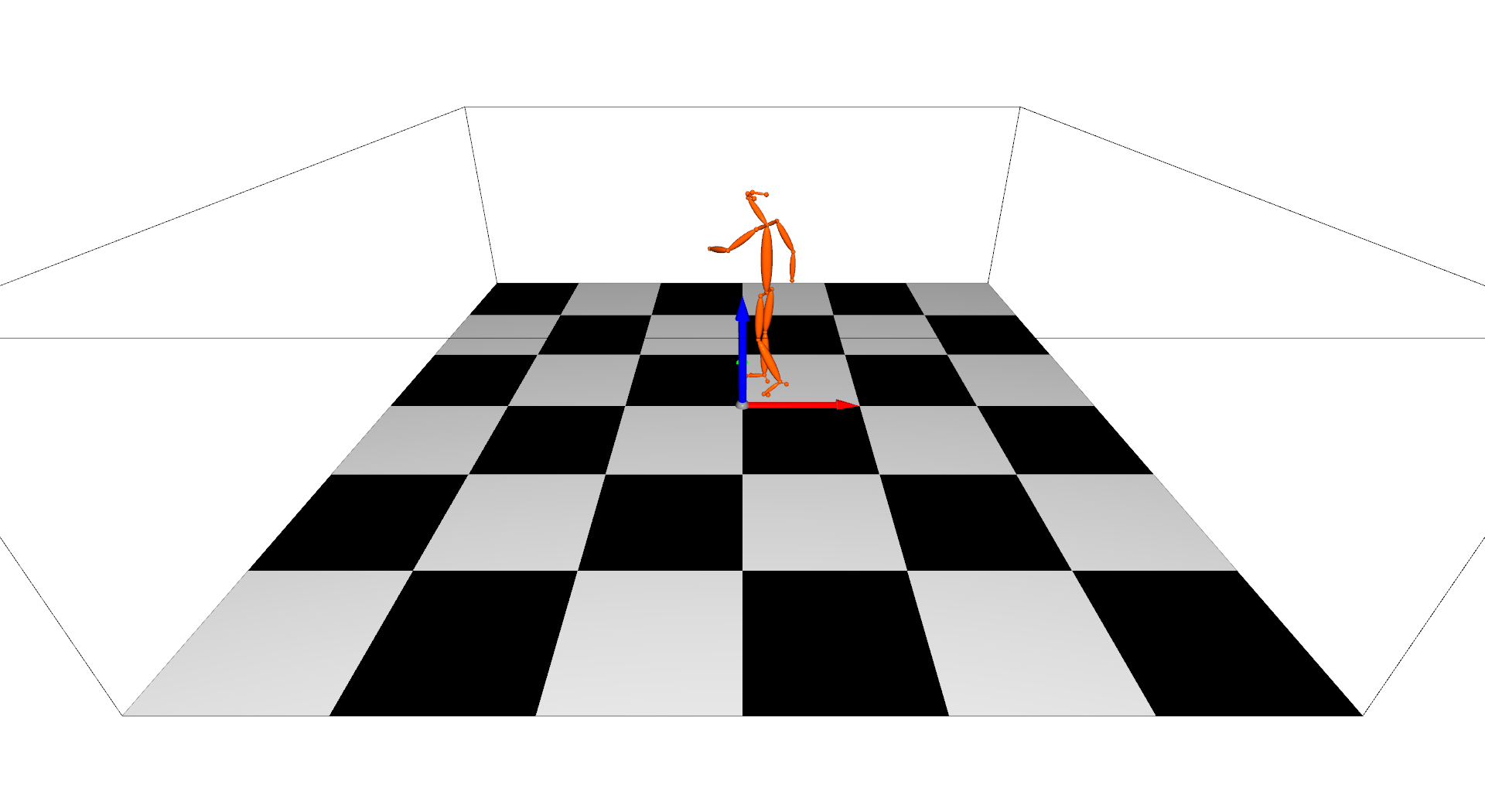
Take the zju-ls-feng results as example, you can show the skeleton in the main window:
Embed this feature to your code
To add this visualization to your other code, you can follow these steps:
# 1. import the base client
from easymocap.socket.base_client import BaseSocketClient
# 2. set the ip address and port
client = BaseSocketClient(host, port)
# 3. send the data
client.send(data)
The format of data is:
data = [
{
'id': 0,
'keypoints3d': numpy.ndarray # (nJoints, 4) , (x, y, z, c) for each joint
},
{
'id': 1,
'keypoints3d': numpy.ndarray # (nJoints, 4)
}
]
Define your scene
In the configuration file, we main define the body_model and scene. You can replace them for your data.