| .. | ||
| assets | ||
| calib_extri.py | ||
| calib_intri.py | ||
| camera_parameters.md | ||
| check_calib.py | ||
| create_blank_camera.py | ||
| detect_chessboard.py | ||
| Readme.md | ||
Camera Calibration
Before reading this document, you should read the OpenCV-Python Tutorials of Camera Calibration carefully.
Some Tips
- Use a chessboard as big as possible.
- You must keep the same resolution during all the steps.
0. Prepare your chessboard
1. Record videos
Usually, we need to record two sets of videos, one for intrinsic parameters and one for extrinsic parameters.
First, you should record a video with your chessboard for each camera separately. The videos of each camera should be placed into the <intri_data>/videos directory. The following code will take the file name as the name of each camera.
<intri_data>
└── videos
├── 01.mp4
├── 02.mp4
├── ...
└── xx.mp4
In this tutorial, we use our sample datasets as an example. In that dataset, the intri data is just like the picture below.

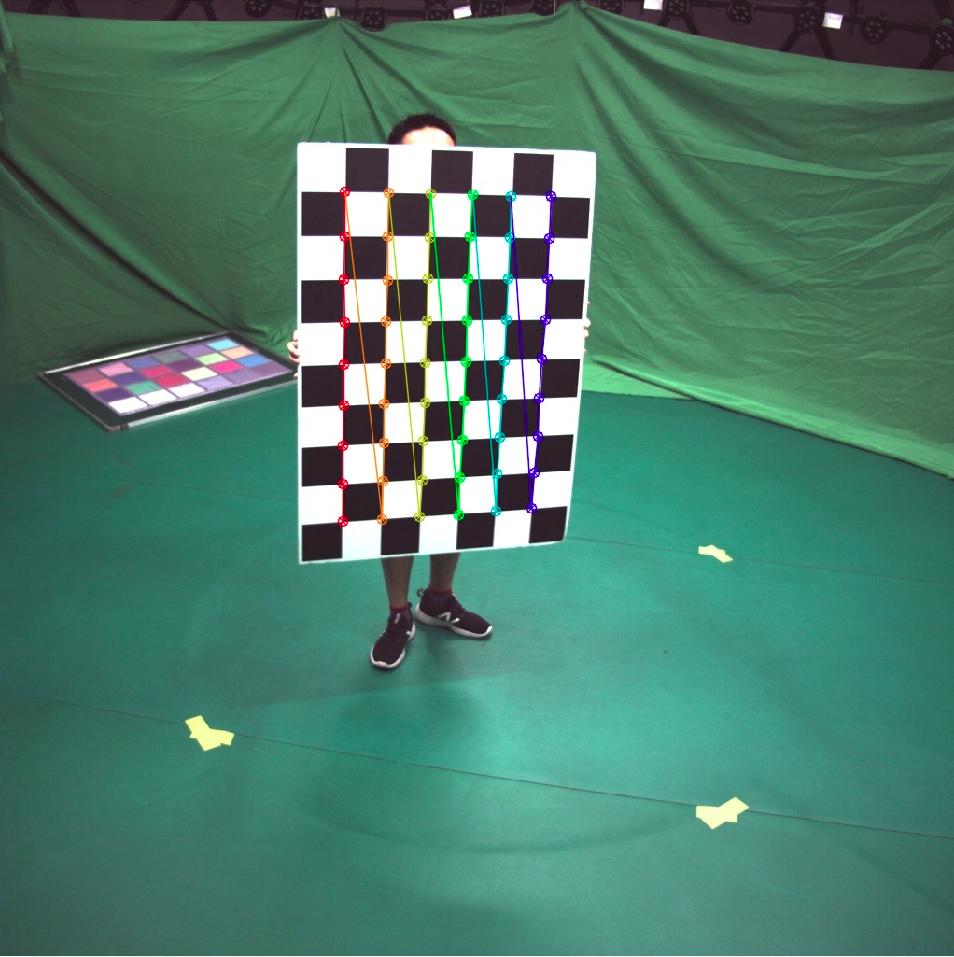
Example Intrinsic Dataset
For the extrinsic parameters, you should place the chessboard pattern where it will be visible to all the cameras (on the floor for example) and then take a picture or a short video on all of the cameras.
<extri_data>
└── videos
├── 01.mp4
├── 02.mp4
├── ...
└── xx.mp4
The sample extri data is like the picture below.

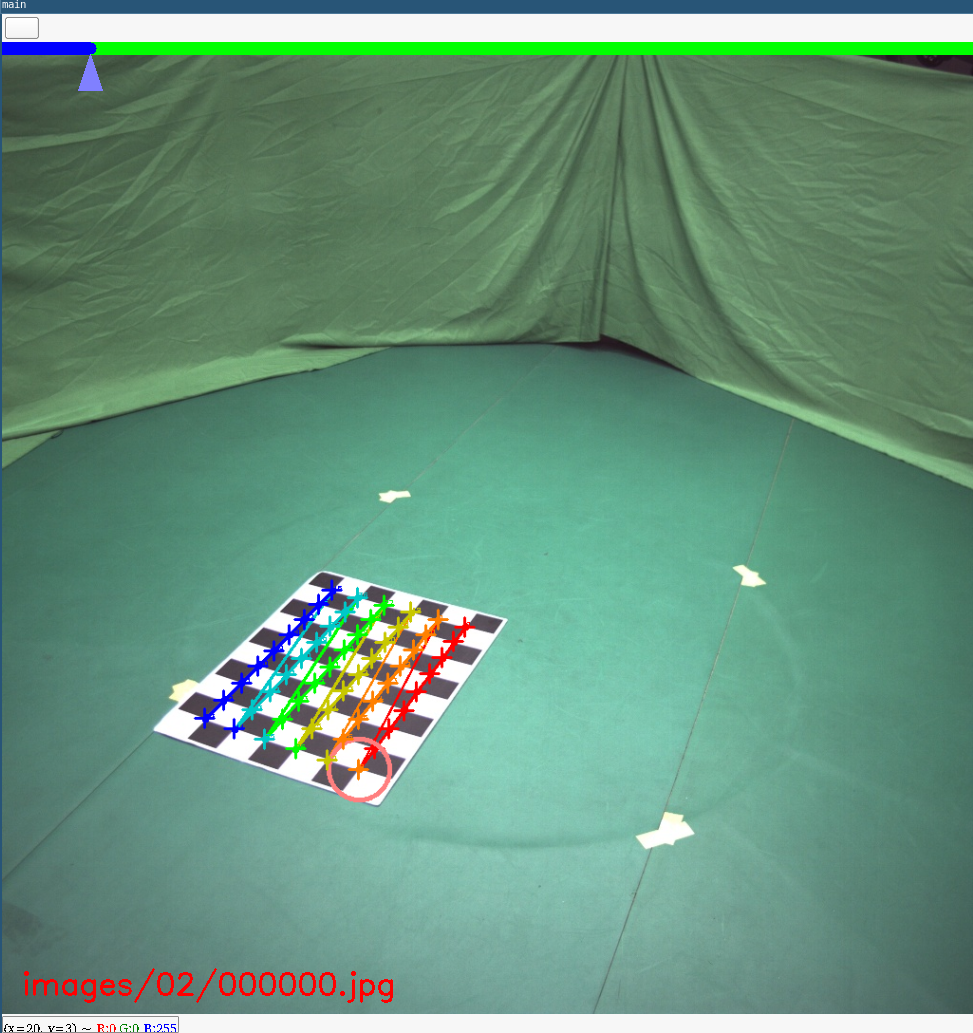
Example Extrinsic Dataset
2. Detect the chessboard
For both intrinsic parameters and extrinsic parameters, we need detect the corners of the chessboard. So in this step, we first extract images from videos and second detect and write the corners.
# extract 2d
python3 scripts/preprocess/extract_video.py ${data} --no2d
# detect chessboard
python3 apps/calibration/detect_chessboard.py ${data} --out ${data}/output/calibration --pattern 9,6 --grid 0.1
The results will be saved in ${data}/chessboard, the visualization will be saved in ${data}/output/calibration.
To specify your chessboard, add the option --pattern, --grid.
Repeat this step for <intri_data> and <extri_data>.
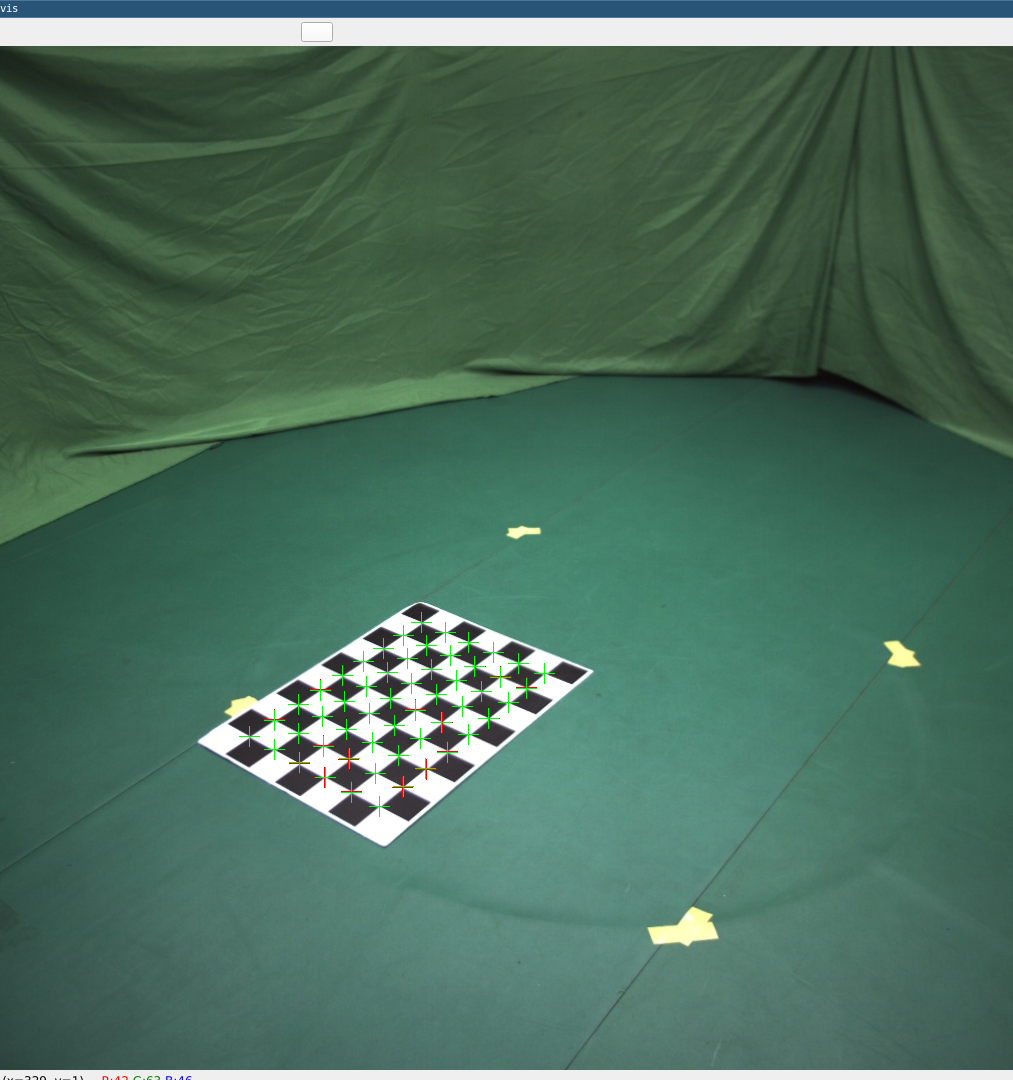
After this step, you should get the results like the pictures below.

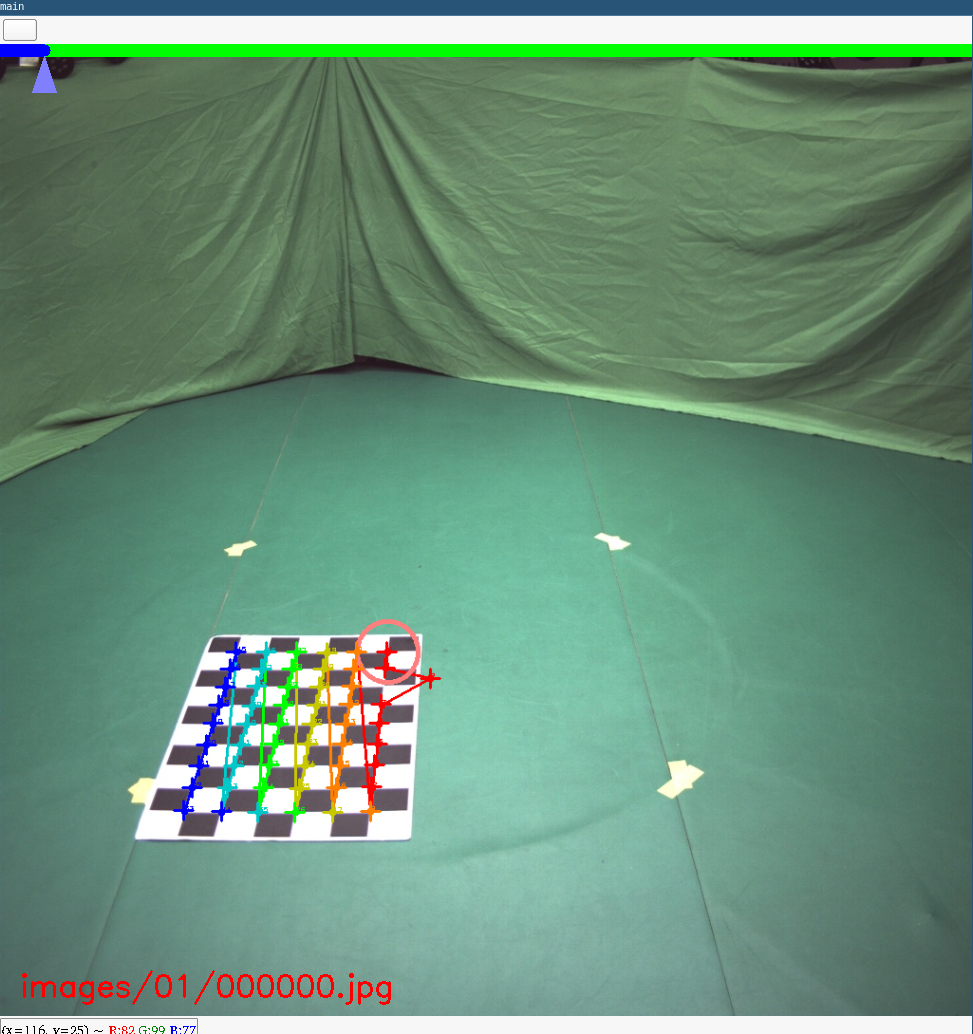
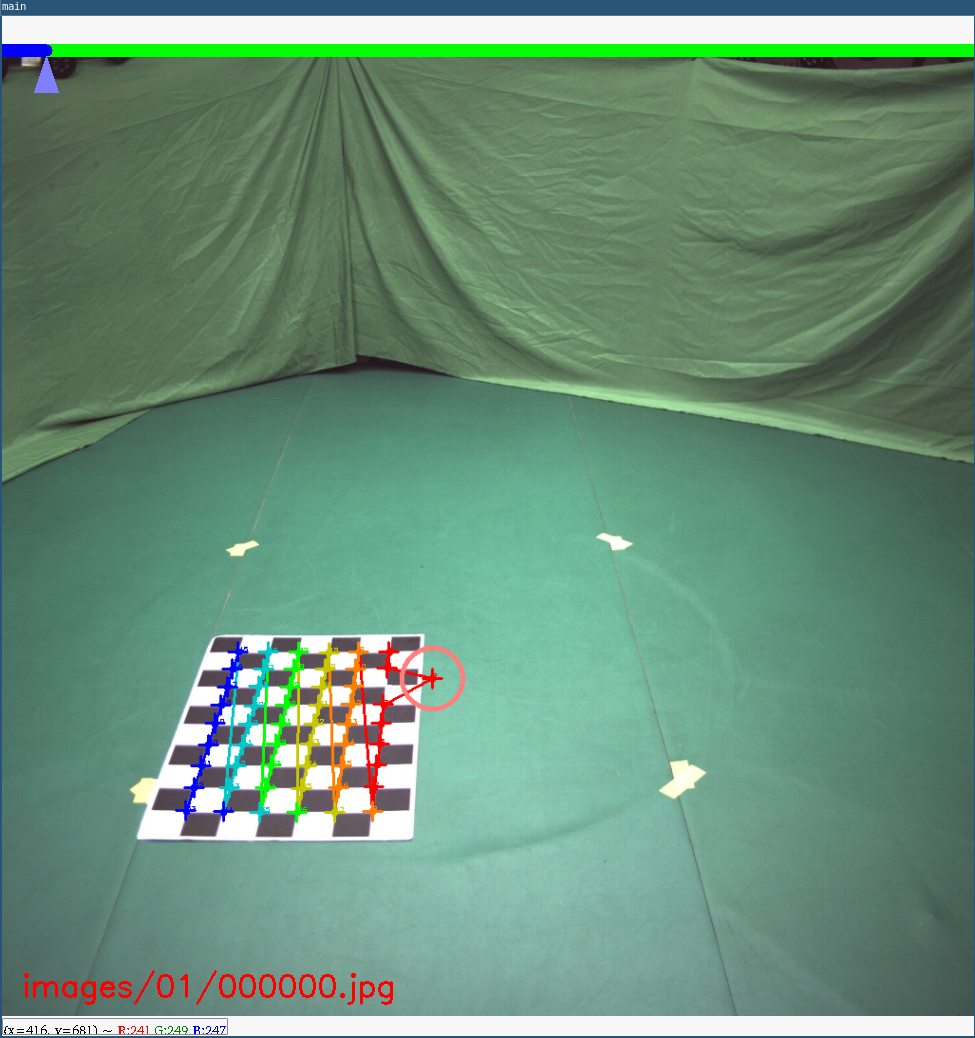
Result of Detecting Extrinsic Dataset
Result of Detecting Intrinsic Dataset
2.5 Finetune the Chessboard Detection Result
It is vital for calibration to detect the keypoints of chessboard correctly. Thus we highly recommend you to carefully inspect the visualization result in ${data}/output. If you find some detection results are wrong, we provide you a tool to make some modifications to them.
python apps/annotation/annot_calib.py $data --mode chessboard --pattern 9,6 --annot chessboard
After running the script above, a OpenCV GUI prompt will show, like below:
Calibration Annotation Toolkit GUI Interface
This tool is component of our awesome annotation toolkits, so some key mapping is similar. To learn more about our annotation tools, please check the document.
At the same time, you can see that the CLI presents some auxilary information.

CLI Prompt of the Annotation Tool
You can learn from the CLI prompt to know the information and which point you are labeling.
In the GUI, the current edited corner is highlighted by a red circle. If you want to make some modification, use mouse to click the correct place, and then a white anchor "+" is presented there.
Use mouse to specify the correct position
If you think the newly specified coordinate(marked as white anchor) should be the correct position for this corner, rather than old one, press Space to confirm. Then the corner position will be changed.

The result after modifing the position of point
After finish modifying this point, press Space to move on to next point.

Press Space to move on to next point
Currently we only support move to next point. If you want to move to previous point, please
Spacefor many times until it back to start.
If you're satisfied with this frame, you can press D move on to next frame.
Press D to move on to next frame
If you press A, you can move back to previous frame.
After finish annotating every frames, press q to quit.
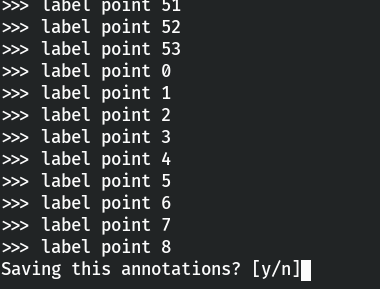
CLI prompt to save the result. Press Y to save and N to discard
Then you can choose whether to save this annotation.
If your data is on remote server, then the OpenCV GUI may be too slow to operate if you directly run the script via ssh X forwarding. We recommend you use
sshfsto mount the remote data directory and locally run this script.
3. Intrinsic Parameter Calibration
After extracting chessboard, it is available to calibrate the intrinsic parameter.
python3 apps/calibration/calib_intri.py ${data} --step 5
After the script finishes, you'll get intri.yml under ${data}/output.
This step may take a long time, so please be patient. :-)
4. Extrinsic Parameter Calibration
Then you can calibrate the extrinsic parameter.
python3 apps/calibration/calib_extri.py ${extri} --intri ${intri}/output/intri.yml
After the script finished, you'll get extri.yml under ${intri}/output.
5. (Optional)Bundle Adjustment
Coming soon
6. Check the calibration
To check whether your camera parameter is correct, we provide several approaches to make verification.
- Check the calibration results with chessboard:
python3 apps/calibration/check_calib.py ${extri} --out ${intri}/output --vis --show
A window will be shown for checking.
Use chessboard to check results
Check the results with a cube.
python3 apps/calibration/check_calib.py ${extri} --out ${extri}/output --cube
You'll get results in $data/output/cube.
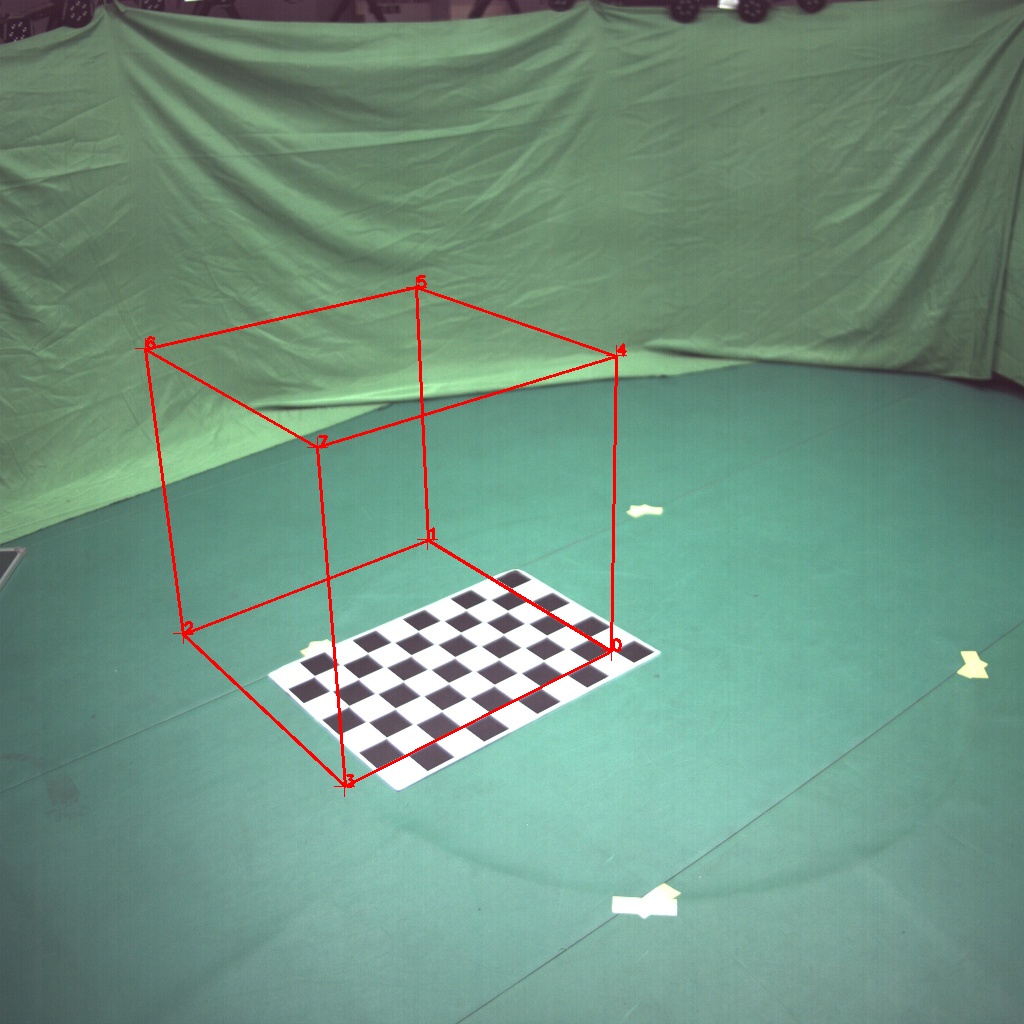
Use cube to check results
- (TODO) Check the calibration results with people.